地理空间数据库:空间网络查询(pgRouting)
利用 PostgreSQL/PostGIS 扩展模块对空间网络数据连通关系进行管理,能够利用
pgRouting实现对路网、河流网、铁路网等典型空间网络数据及几何拓扑数据的常见功能分析。
要求
- 能够利用 pgRouting
实现对路网、河流网、铁路网等典型空间网络数据进行拓扑分析; - 能够解决拓扑关系创建过程中的拓扑“gap”、“Insections”等问题;
- 掌握 pgRouting
最短路径分析用法,能够自定义函数实现任意两点或多点之间的路径查询; - 能够根据掌握 pgRouting 解决生活中实际常见路径分析问题。
任务 1:简单道路网分析及路径查询(无向)
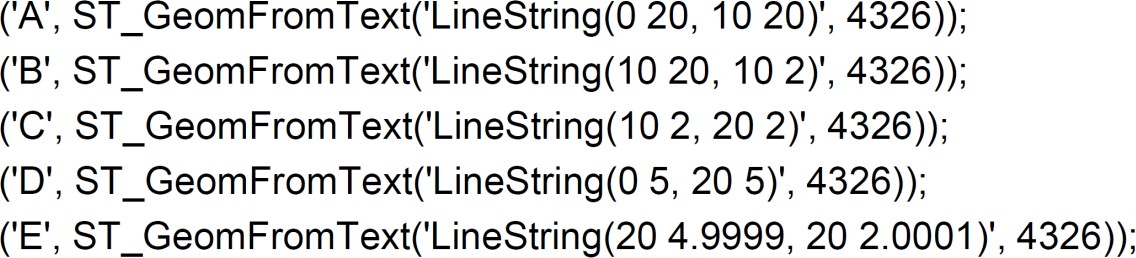
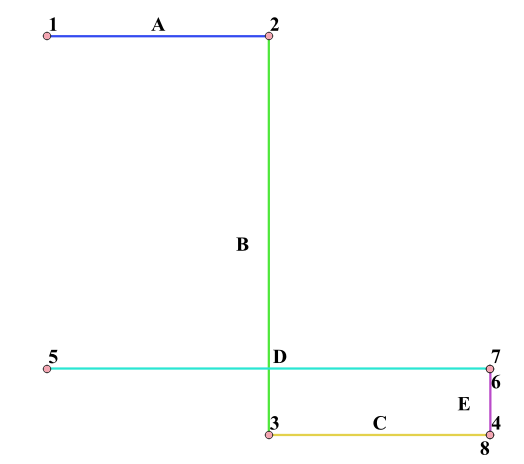
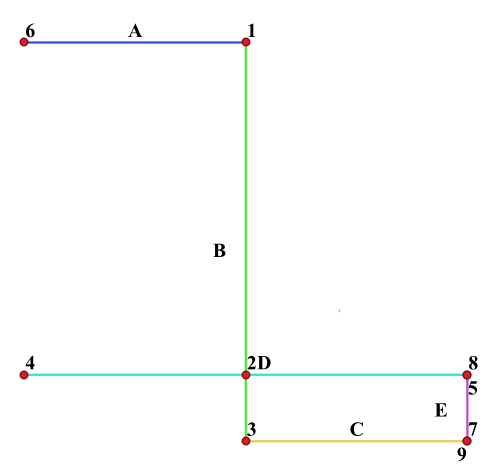
有如下道路网,涵盖 A、B、C、D、E 等 5 个线路;
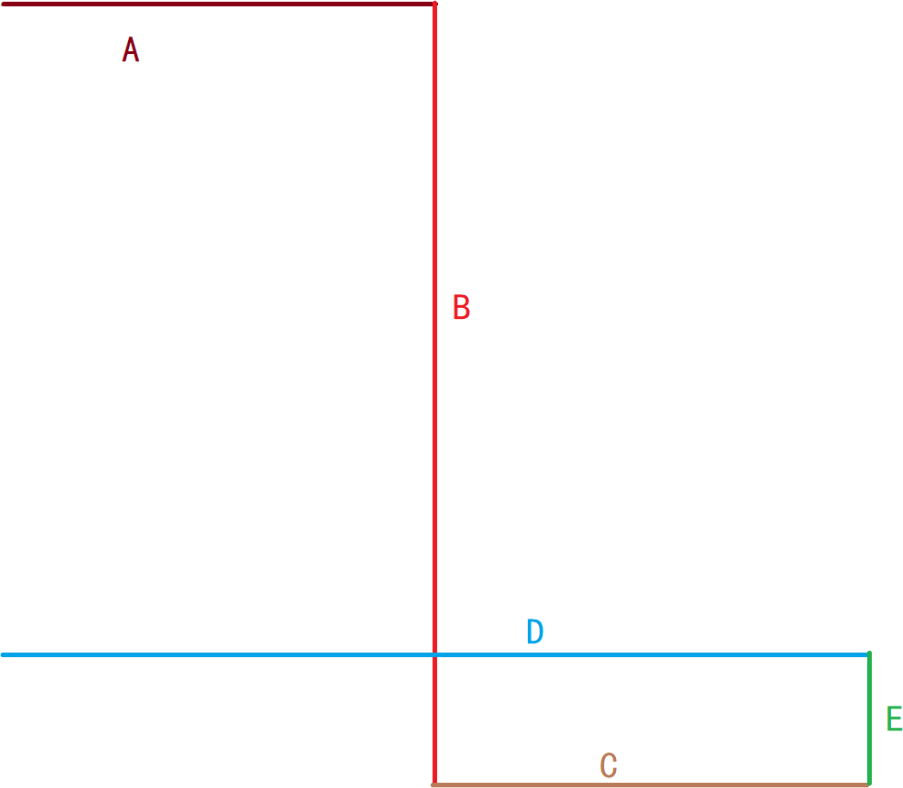
其关系表、几何坐标及参考系如下所示:
1、创建上述道路网拓扑关系,不允许有 gap 和intersection 等异常。
Answer:
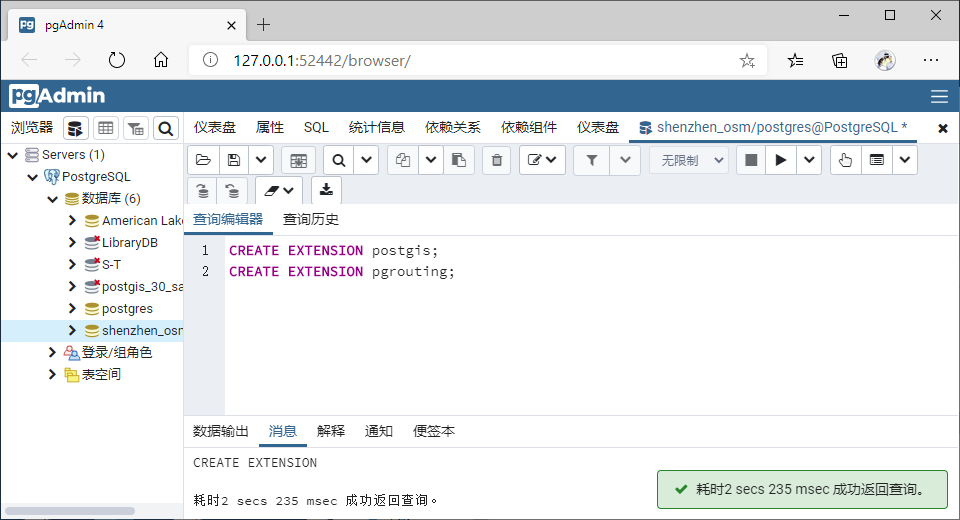
创建一个新的数据库,并加载postgis和pgRouting扩展;
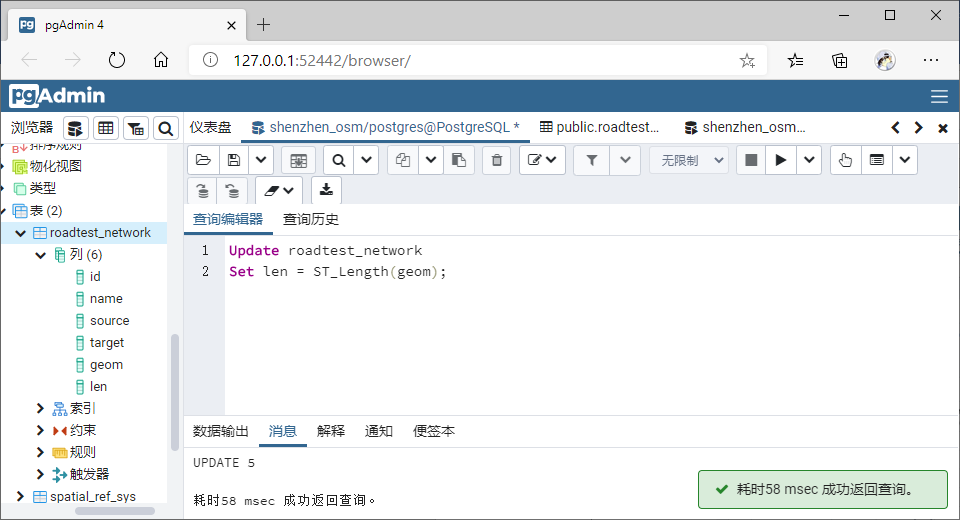
创建Roadtest_Network表,并导入路网数据,并更新长度;
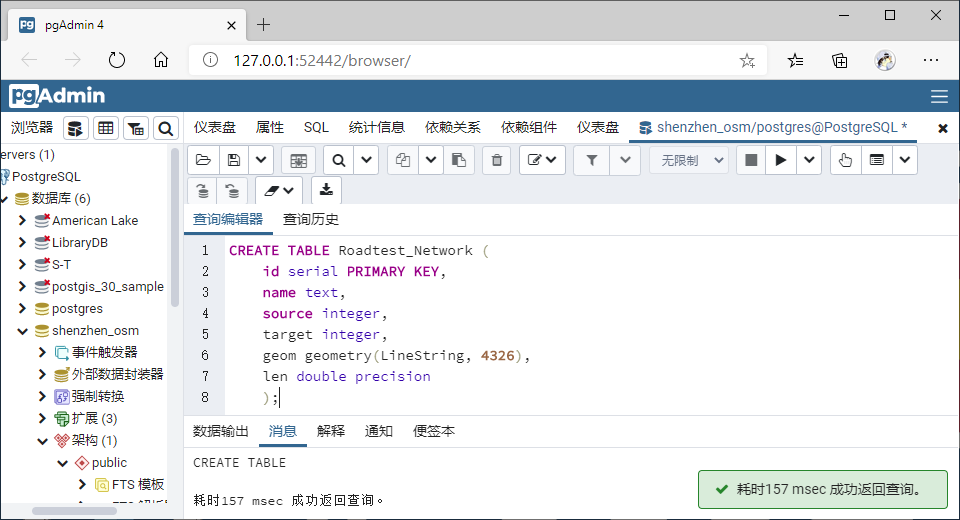
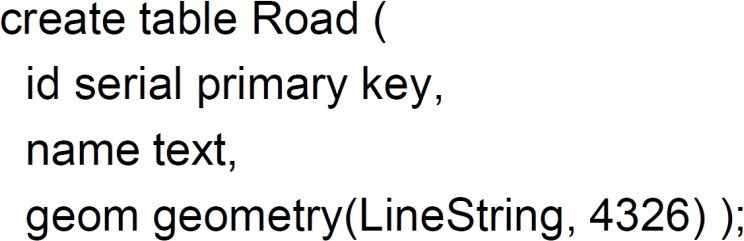
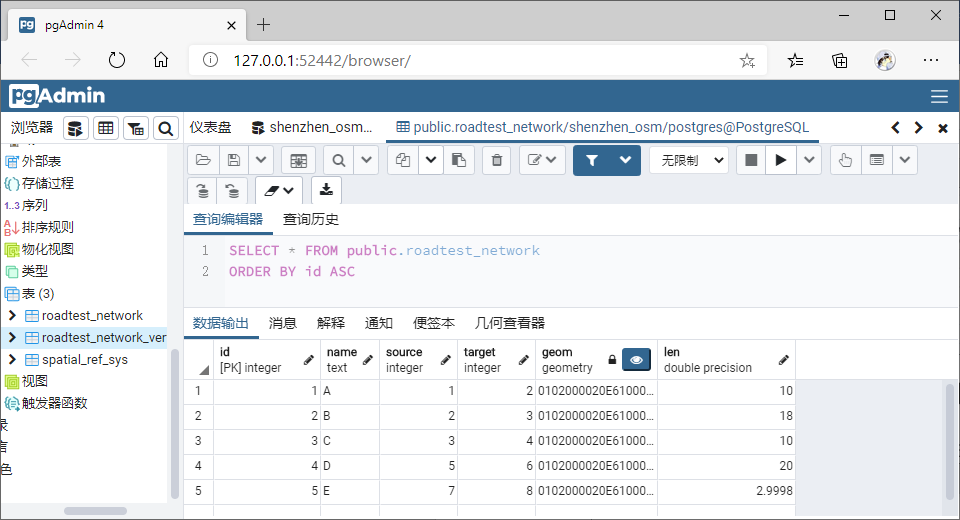
Step1:创建的 Roadtest_Network 表:属性有:id(PK)、name、
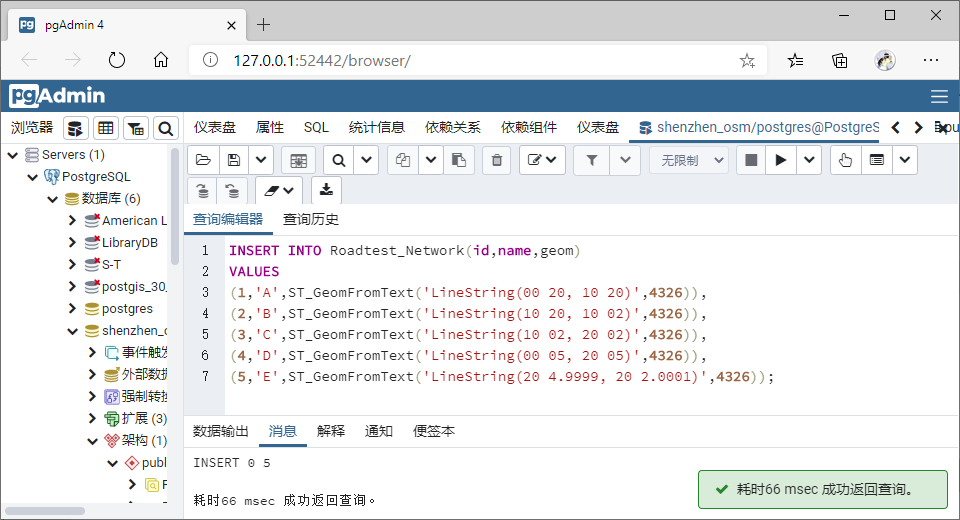
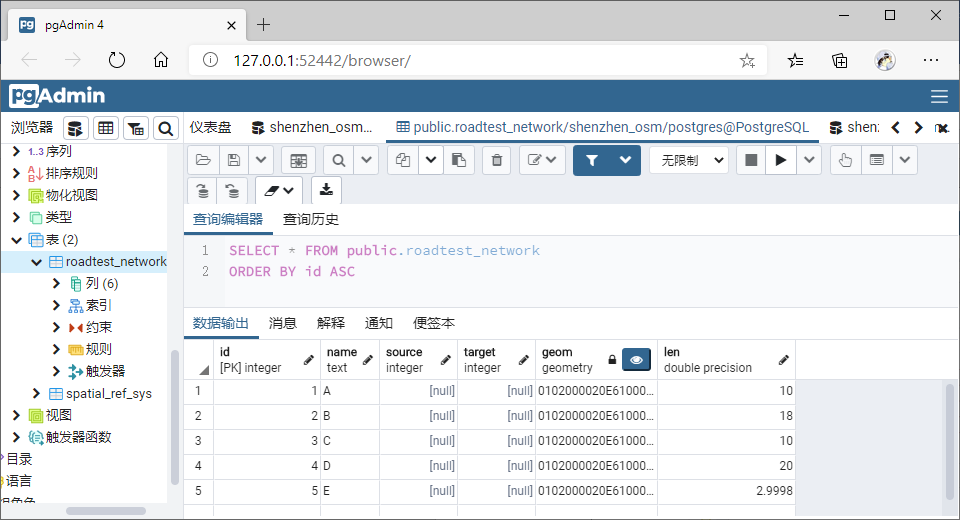
source、target、geom、len(作为无向图路段通过的耗时成本)等,并插入相关信息;【该表用以存储网络关系】。表内容信息如下:
Step2:在 Roadtest_Network 表创建拓扑关系:
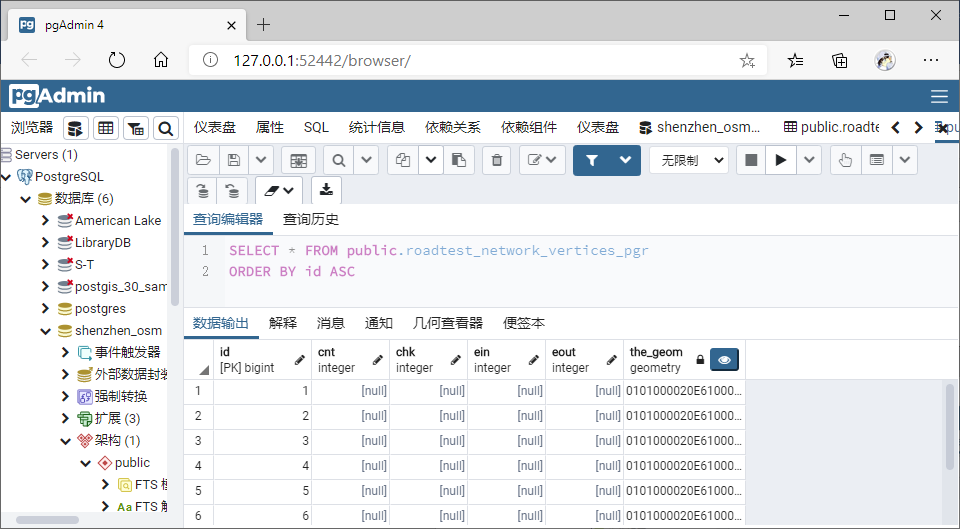
输出日志:创建了 5 条边拓扑,生成一个节点表*_vertices_pgr
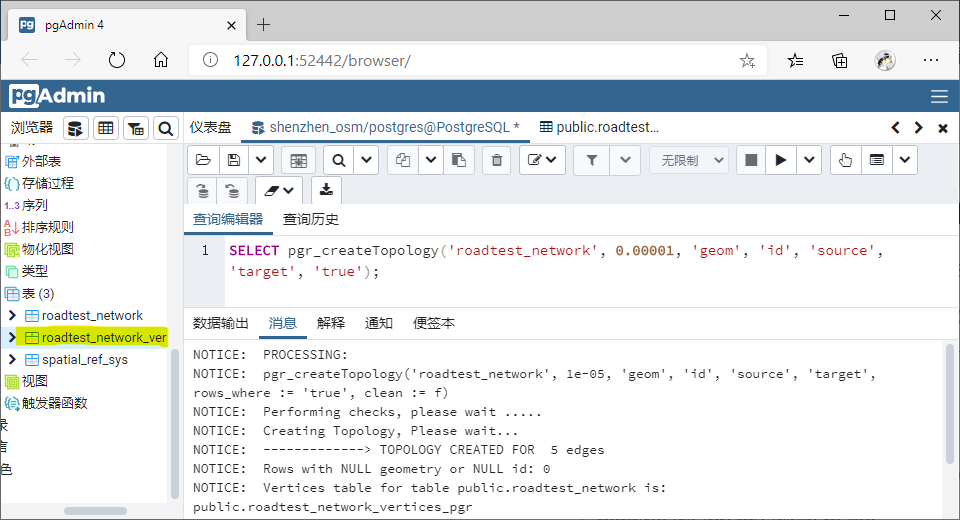
Roadtest_Network 表中 source 和 target 已被节点填充;
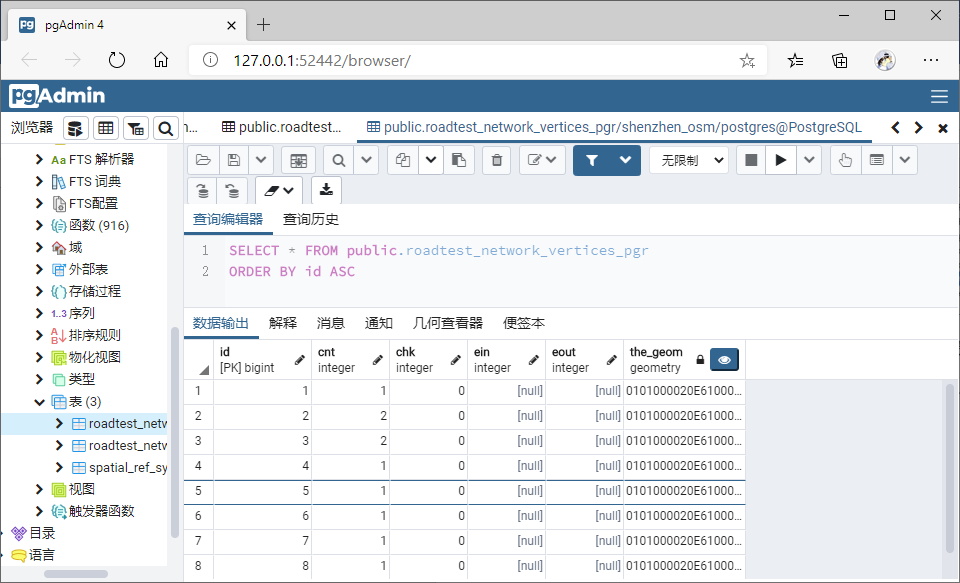
同时,节点表存储所有拓扑节点,但属性 cnt(当前节点被使用的次数)等为空;
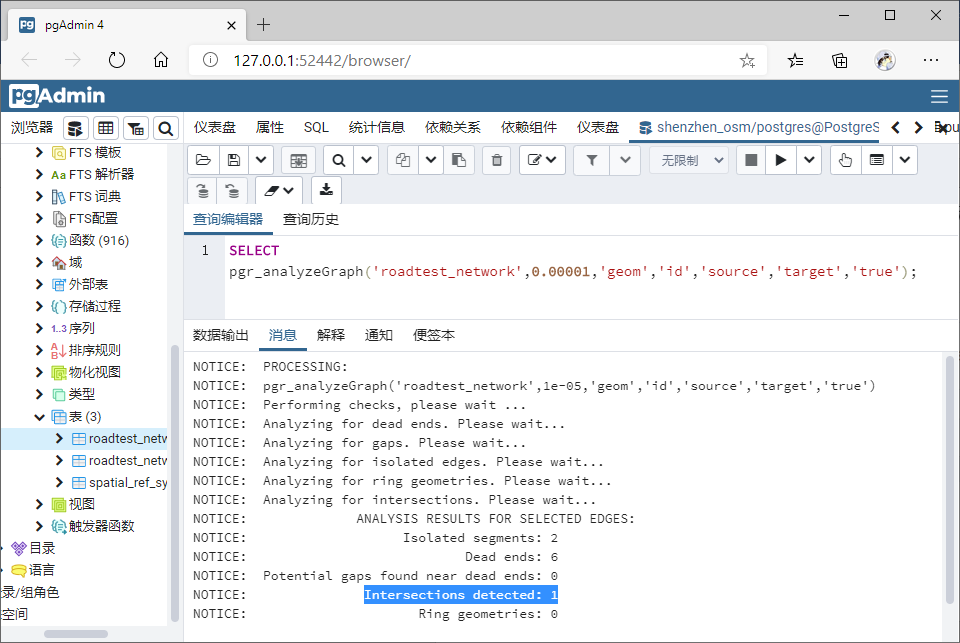
采用拓扑分析函数分析“边”和“节点”表,更新相关属性信息,
同时分析已创建拓扑关系有没有异常信息:
检查成功,但该拓扑关系存在一个“相交”问题:
同时“节点”表 cnt(当前节点被使用的次数)属性已更新:
QGIS 中查看“节点”表:
**Step3:**用节点重构函数 pgr_nodeNetwork 重构节点表,避免存在“相交”问题:
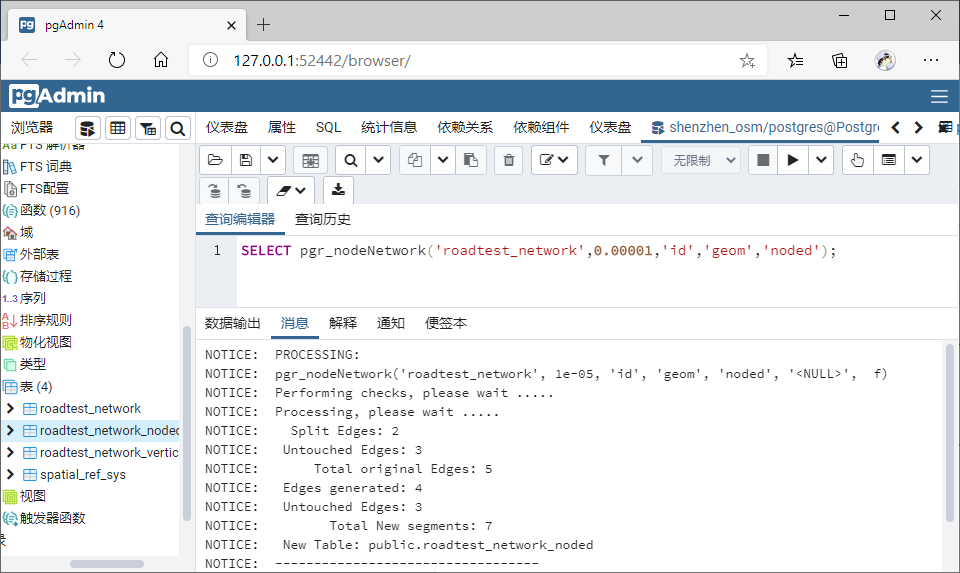
可以看出:重构后将 2(B)和 4(D)两条线段分别分割成 2 条线。

Step4:基于 Roadtest_network_noded 表重建拓扑关系:
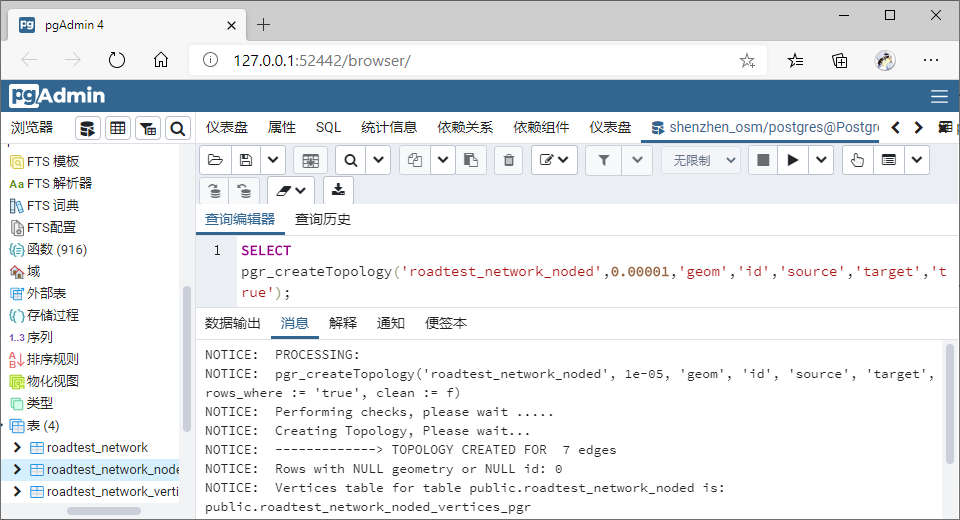
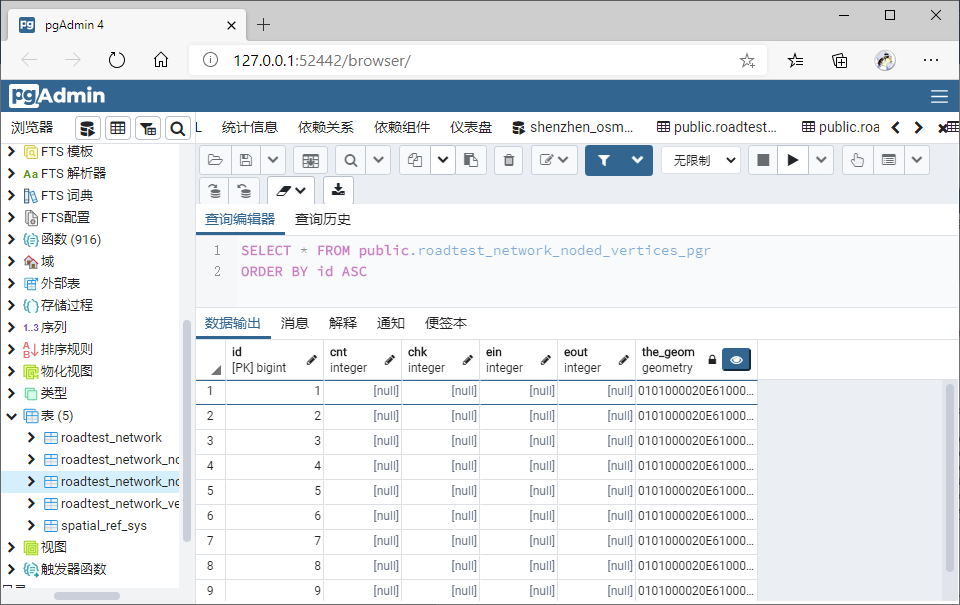
节点表:
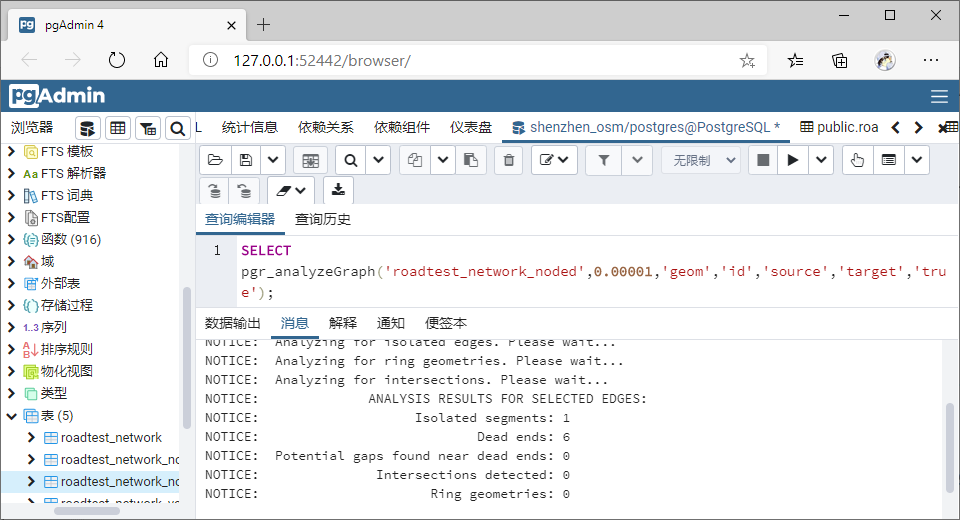
检查拓扑关系:
QGIS 查看重构拓扑之后的图示意:
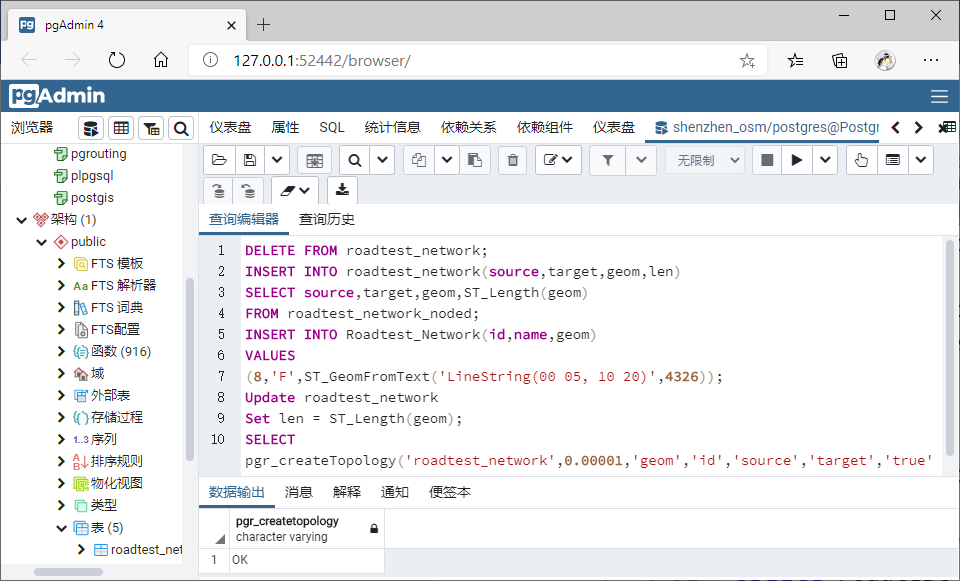
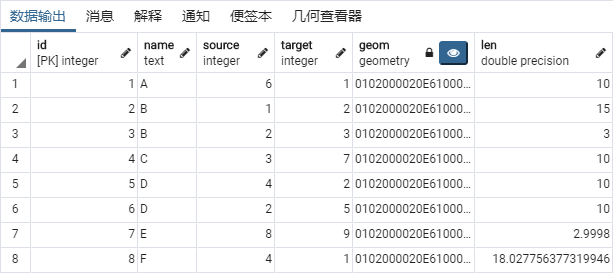
2、新增加路
F,从(0,5)到(10,20),重新拓扑分析,后将“边”与“节点”关系重新排列,按 ID
顺序排放,方便最短路径查询,重排后如下:
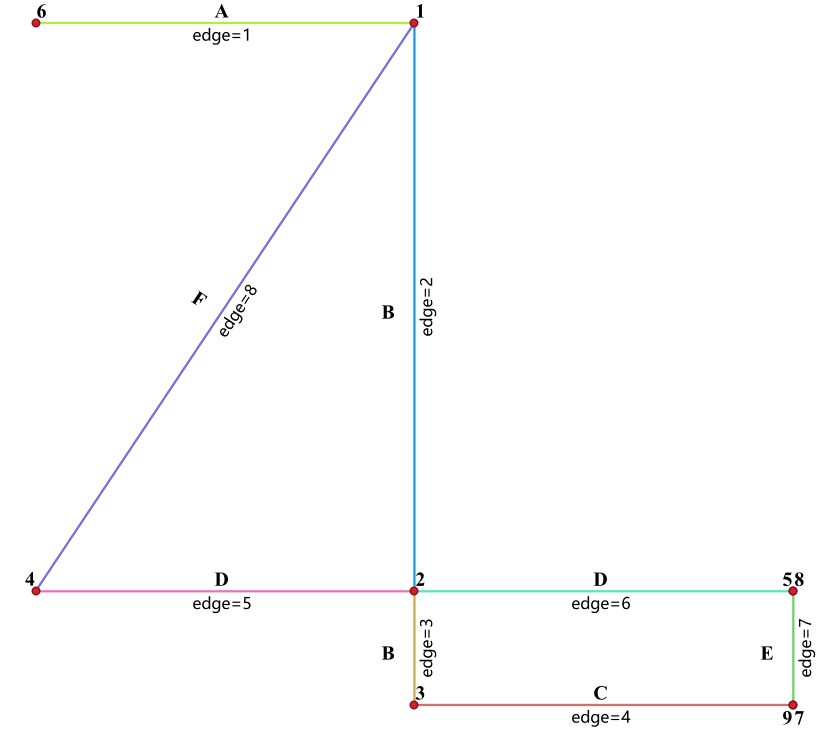
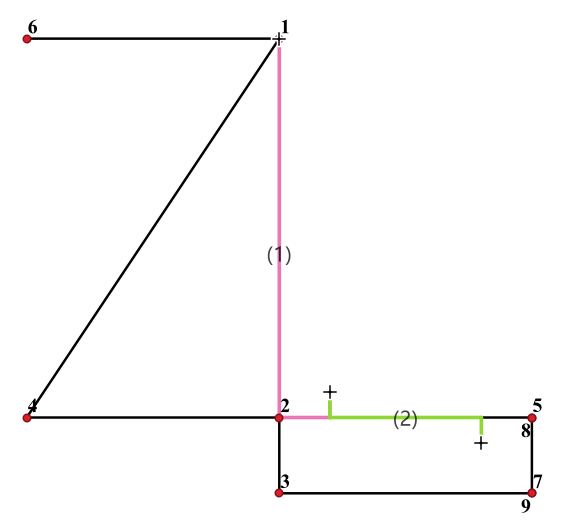
根据上述拓扑关系,完成以下查询:
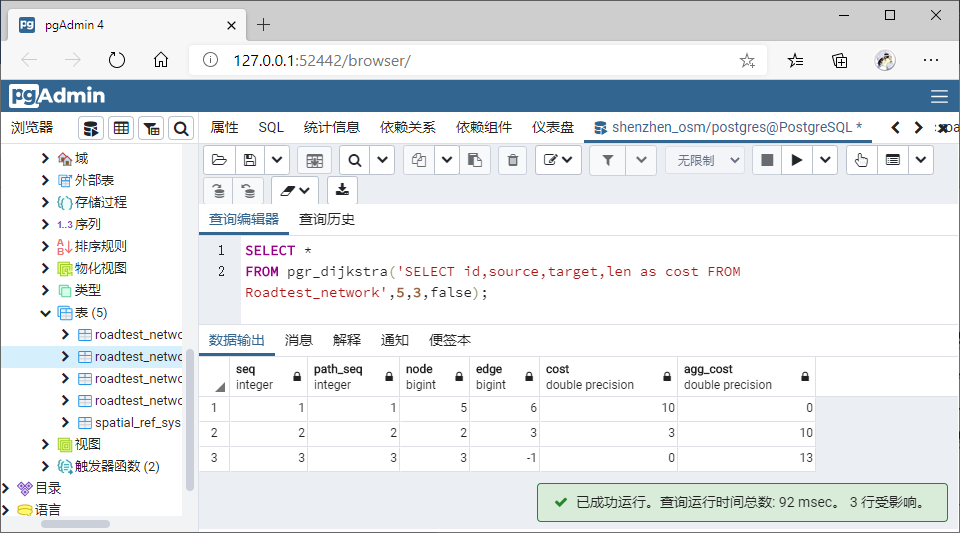
(1)查询节点 5 至 3 的最短路径;
(2)查询(12,6)到(10,20)的最短距离,查询(12,6)到(18,4)的最短距离;
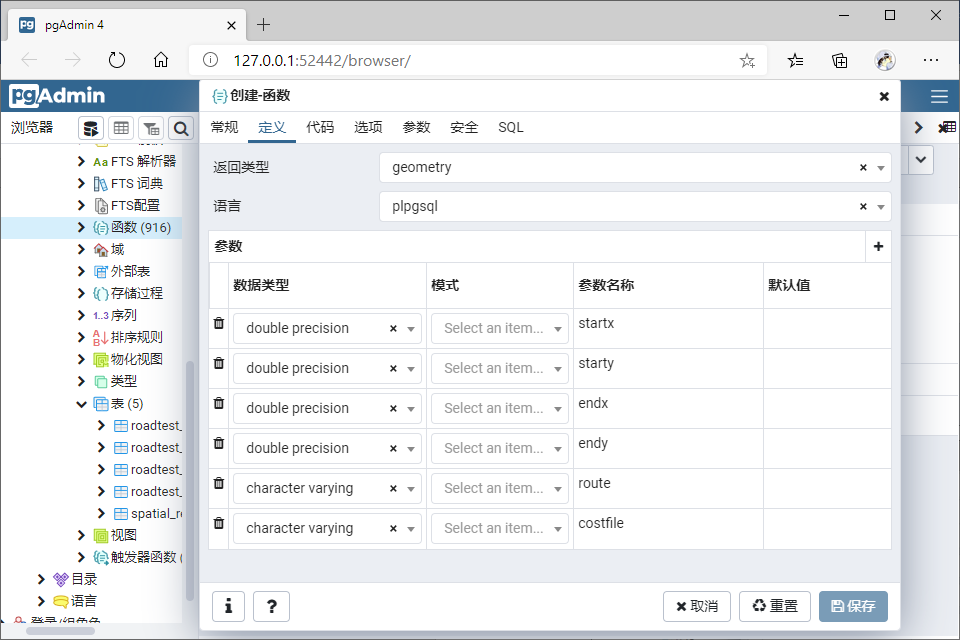
创建自定义函数
- 查询(12,6)到(10,20)的最短距离
- 查询(12,6)到(18,4)的最短距离;
在QGIS中展示结果
任务 2:深圳市道路网最短路径查询(双向)
1、实验数据准备
首先要下载 OpenStreetMap 中国地区数据,下载地址:Geofabrik Download Server
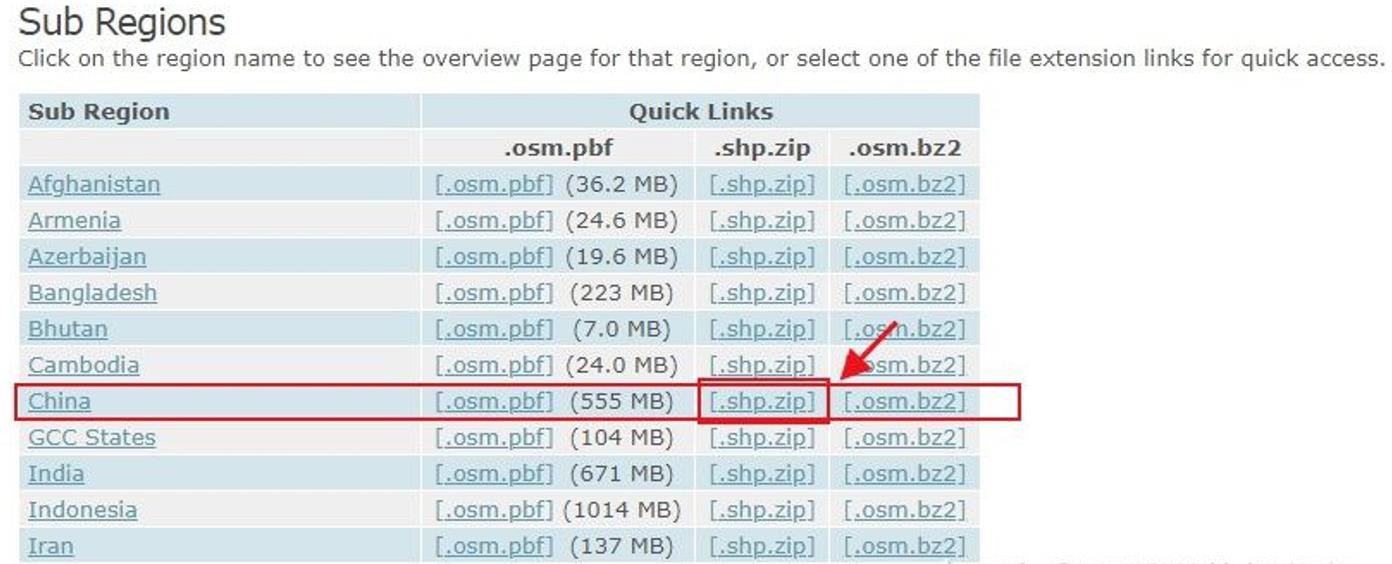
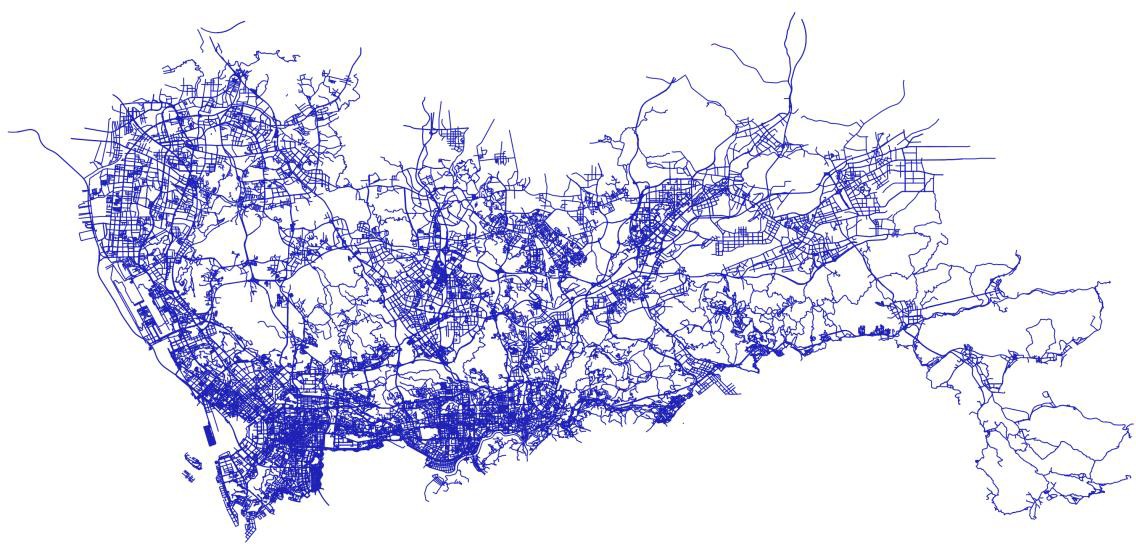
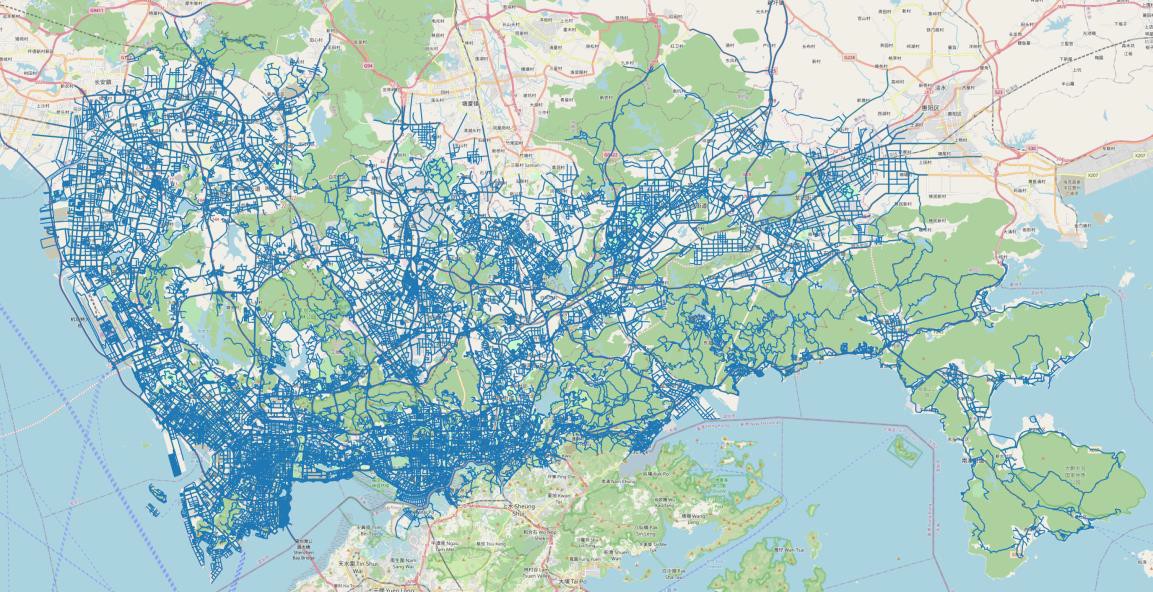
方式一:下载 shapefile 格式数据,然后裁剪出深圳范围的路网数据;
方式二:下载 OSM 格式数据,通过osm2pgsql-1.2.1-x64 工具将OSM
数据导入PostgresSQL;
**注:**由于 OSM 数据是WGS84 坐标系(EPSG:4326)的,所以还需将其转换为 Web
墨卡托坐标系(EPSG:3857)。另外还需要使用ArcGIS
中的"要素转线"这个工具将折线数据在相交点处打断:
深圳市道路网数据如下所示:
2、将数据导入数据库
2.1创建数据库
做任务1时已经创建并已加载两个扩展
2.2使用 PostGIS 的数据导入工具导入数据
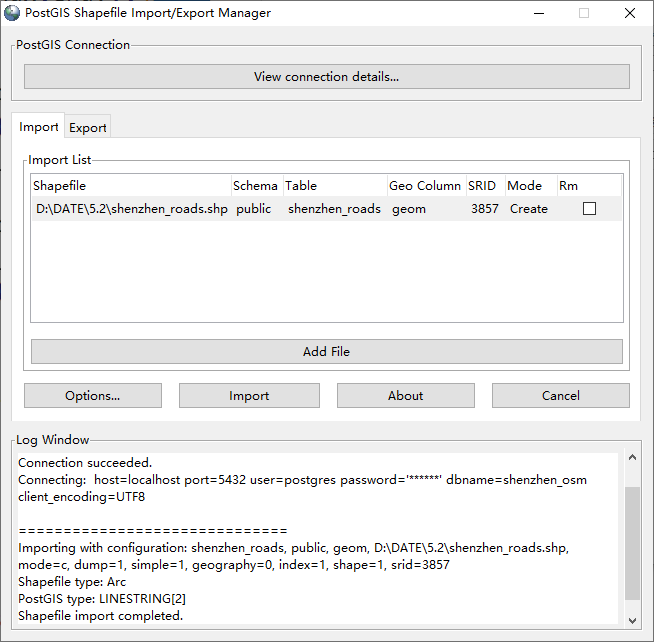
3、设置路径成本并建立路网拓扑
3.1设置路径成本
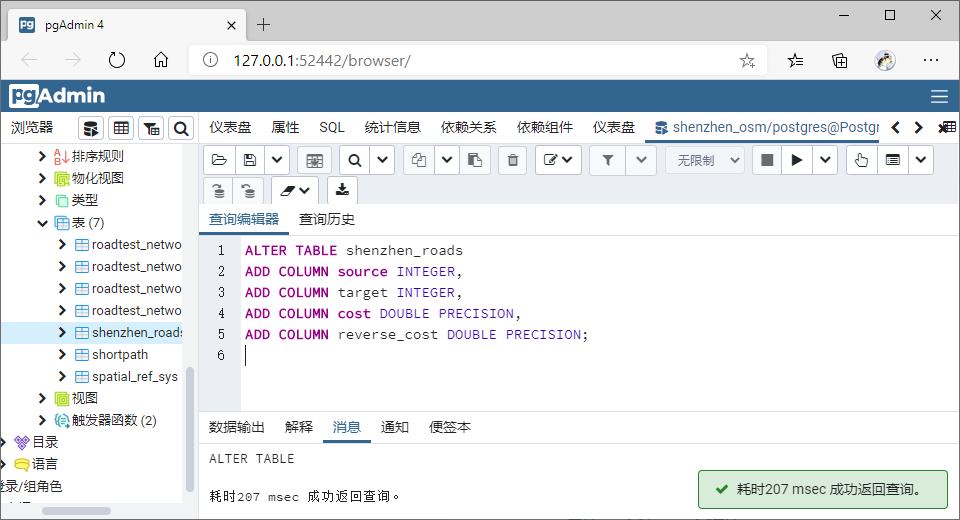
首先为shenzhen_roads 表添加四个字段:
-
source —— 用于保存路径起始顶点的id
-
target —— 用于保存路径终止顶点的id
-
cost —— 用于保存路径正向的成本(或者代价)
-
reverse_cost —— 用于保存路径反向的成本(或者代价)
SQL 语句:
ALTER TABLE shenzhen_roads
ADD COLUMN source INTEGER,
ADD COLUMN target INTEGER,
ADD COLUMN cost DOUBLE PRECISION,
ADD COLUMN reverse_cost DOUBLE PRECISION;
OSM 数据包含一个 oneway 列,它的值可能是以下三个值之一:
-
'F' —— 表示该路径是单向的,且路径方向是正向的。
-
'T' —— 表示该路径是单向的,且路径方向是反向的。
-
'B' —— 表示该路径是双向的。
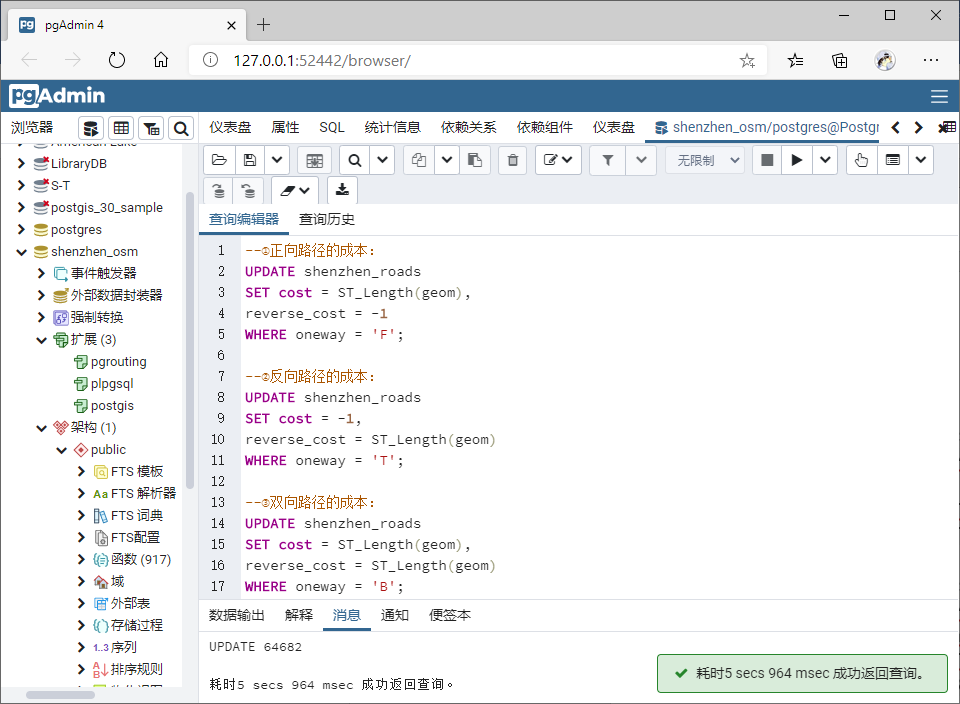
现在就根据路径的方向来计算各个路径的成本。
将路径的长度作为成本,如果路径是正向的,则 cost 值为路径的长度,reverse_cost
值为-1;如果路径是反向的,则 reverse_cost 值为路径的长度,cost
值为-1;如果路径是双向的,则 cost 和reverse_cost 的值都为路径的长度。
①正向路径的成本:
UPDATE shenzhen_roads
SET cost = ST_Length(geom),
reverse_cost **= -**1
WHERE oneway = 'F';
②反向路径的成本:
UPDATE shenzhen_roads
SET cost = -1,
reverse_cost = ST_Length(geom)
WHERE oneway = 'T';
③双向路径的成本:
UPDATE shenzhen_roads
SET cost = ST_Length(geom),
reverse_cost = ST_Length(geom)
WHERE oneway = 'B';
3.2创建路网拓扑
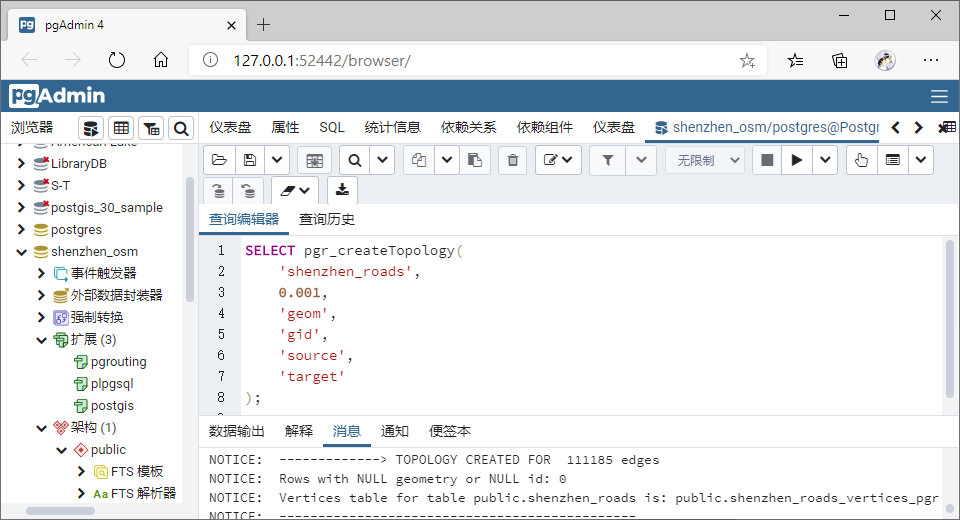
**Key1:**创建路网拓扑需要调用 pgr_createTopology 函数:
SELECT pgr_createTopology(
'shenzhen_roads',
0.001,
'geom',
'gid',
'source',
'target'
);
上面的六个参数分别表示:
-
路网表
-
路径之间的容差,两条路径的距离大于这个容差值,就表示它们不相交(拓扑不捕获节点)。
-
包含几何图形信息的列
-
路网表的主码列
-
保存路径起始顶点的 id 的列
-
保存路径终止顶点的 id 的列
拓扑路径创建完成后,下图日志表明“深圳道路”网拓扑边 111185 条 , 同 时 数 据 库
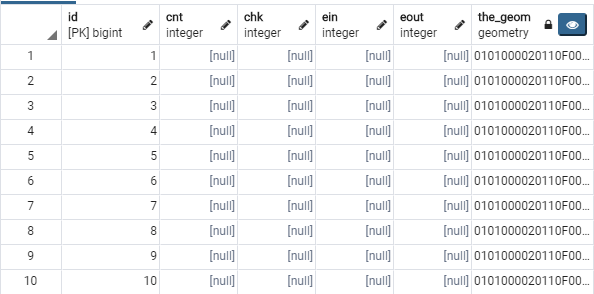
中 会 自 动 多 出 一 张 “ 拓 扑 节 点 ”
表shenzhen_roads_vertices_pgr,存储该拓扑边关系的所有“节点”:
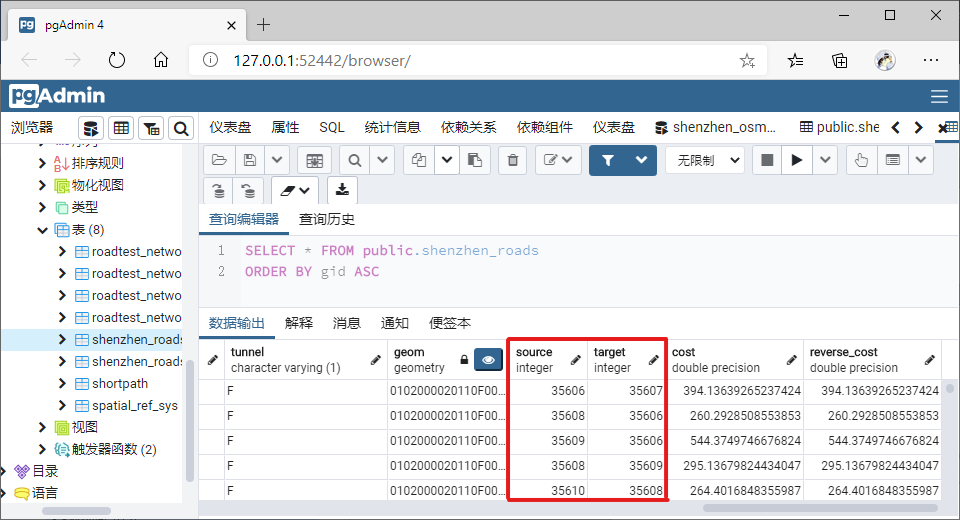
同时所有拓扑路径边的起始、终止顶点数据信息更新在了shenzhen_roads 表中:
Key2:拓扑检查:通过拓扑检查函数检查该拓扑关系是否存在异常问题,如下图所示,该拓扑关系并“gap”、“Intersections”等异常,无需节点重构。
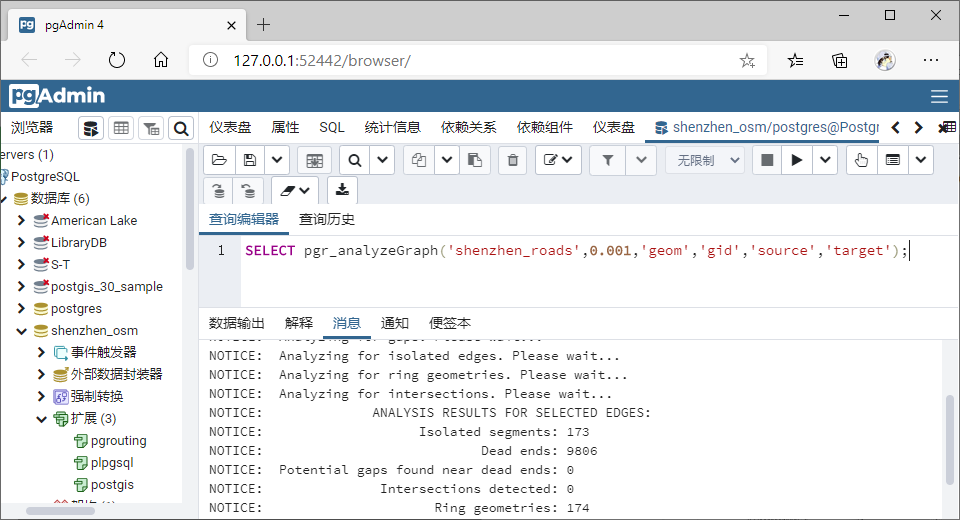
同时节点表cnt(当前)
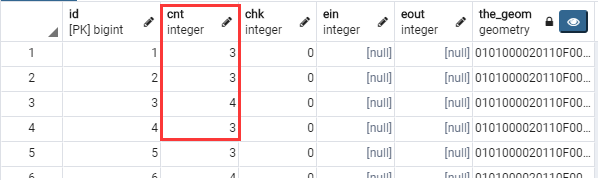
与路网一起可视化显示:
4、最短路径查询
清华大学深圳研究院(ID:59005)
中科院深圳先进技术研究院(ID:59193)
塘朗山郊野公园西北(ID:57059)
塘朗山郊野公园东(ID:16177)
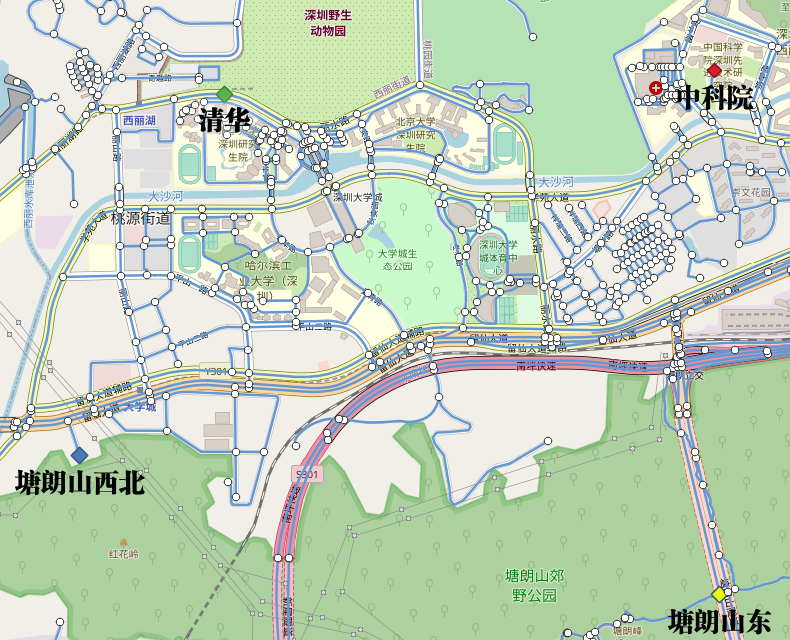
注:上述四个地方的拓扑 ID 不同电脑可能不同,需要针对自己创建的拓扑进行查看。
在确定 ID 时,一定满足最短路径分析函数的 source 和 target 要求,否则无结果。
4.1 基于行人的无向路径查询,考虑不同代价方式。
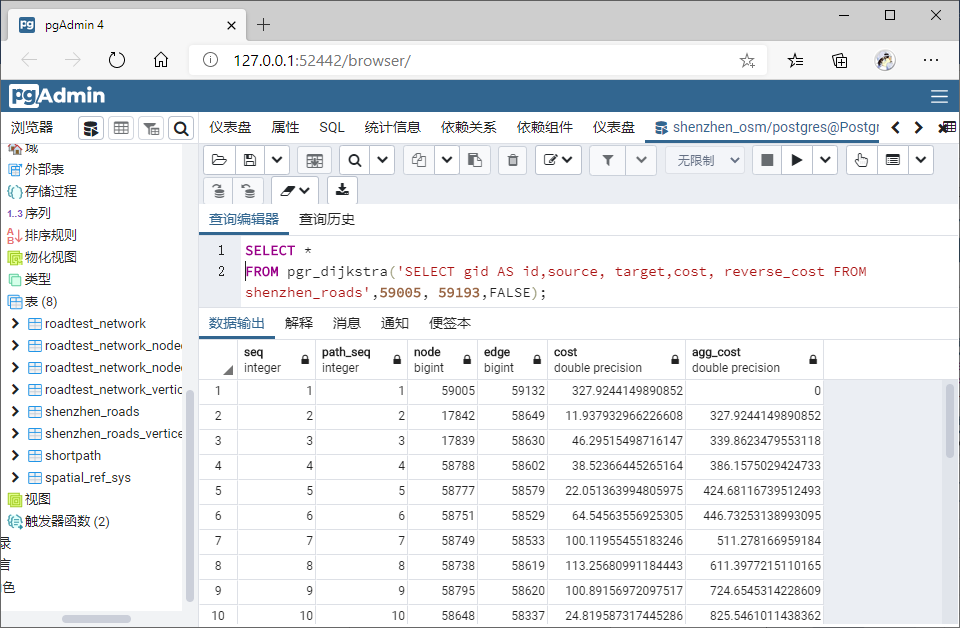
Ex1:单条行人路线(一到一)
从清华步行至中科院的最短距离,并用 QGIS
展示最短路径。从行人的角度看,图是无向的,即行人在所有路段上都可以沿道路的两个方向移动。行人的步行的代价按路线长度来衡量的(前面我们已经计算过路径的距离cost
和 reverse_cost)。
SELECT * FROM pgr_dijkstra(
'SELECT gid AS id,
source, target,
cost, reverse_cost
FROM shenzhen_roads',
59005, 59193,
directed := FALSE
);
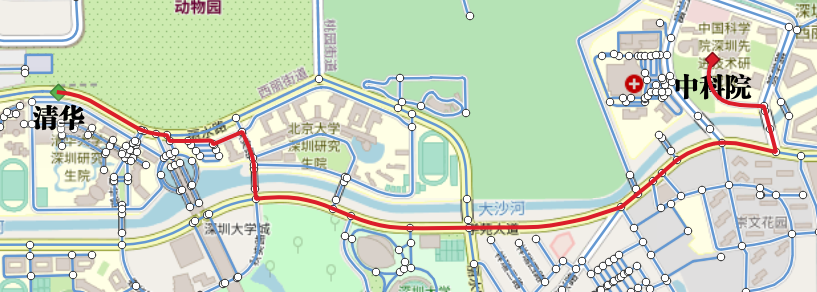
可视化:
QGIS 查看结果如下:
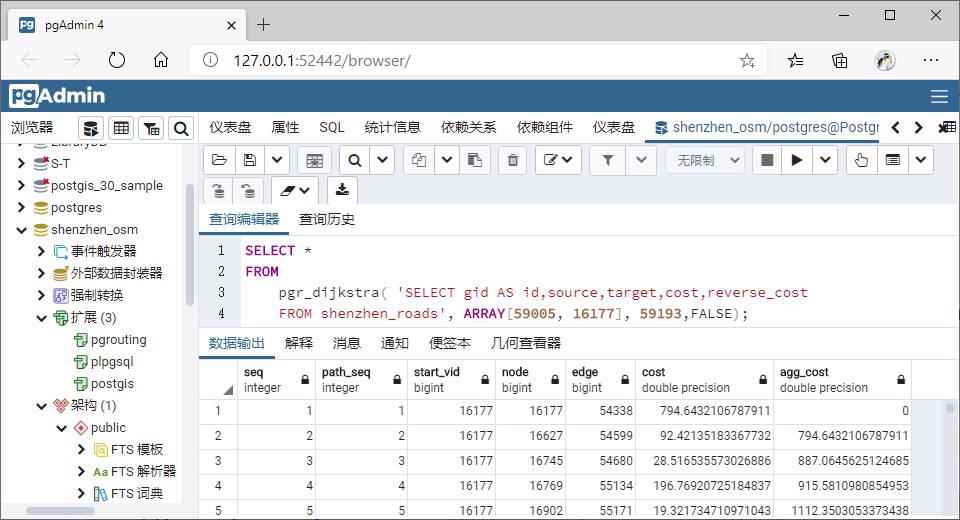
Ex2: 多个行人前往同一个目的地(多到一)
一个人从清华步行至中科院,另一个人从塘朗山郊野公园东步行至中科院,两人出发地不同,目的地一致。
SELECT * FROM pgr_dijkstra(
'SELECT gid AS id,
source, target,
cost, reverse_cost
FROM shenzhen_roads',
ARRAY[59005, 16177], 59193,
directed := FALSE
);
可视化:

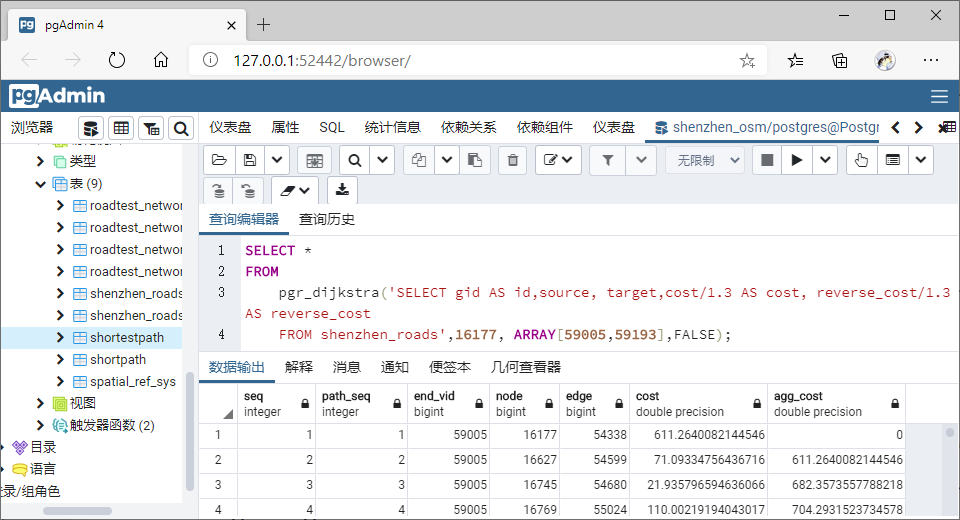
Ex3: 许多行人从同一地点离开(一到多)
两人分别从塘朗山郊野公园东离开,一个去清华,一个去中科院。使用行人的步行时间作为成本(以最短时间为佳),行人的步行速度为speed
= 1.3 m/s,所以步行时间time = distance / speed。
SELECT * FROM pgr_dijkstra(
'SELECT gid AS id,source, target,
cost/1.3 AS cost, reverse_cost/1.3 AS reverse_cost
FROM shenzhen_roads',
12089, ARRAY[10564, 13019],
directed := FALSE
);
可视化:

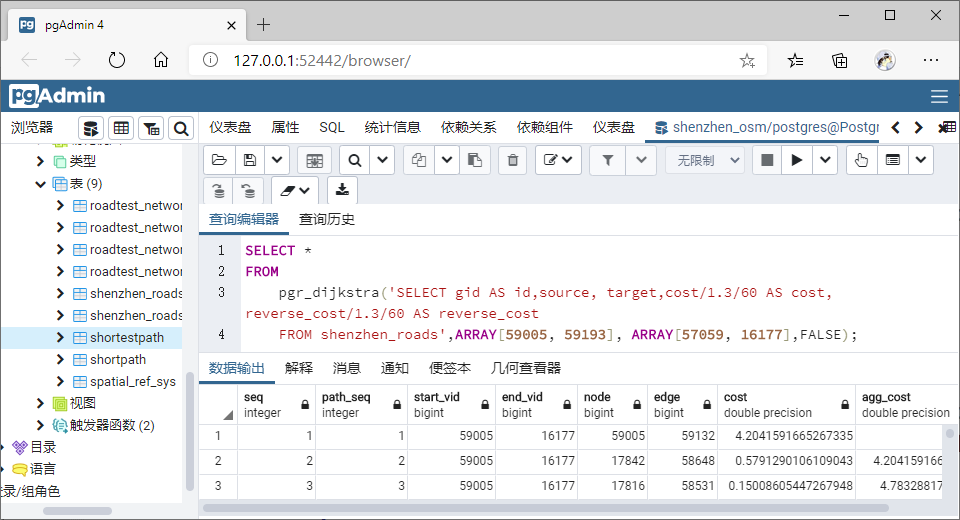
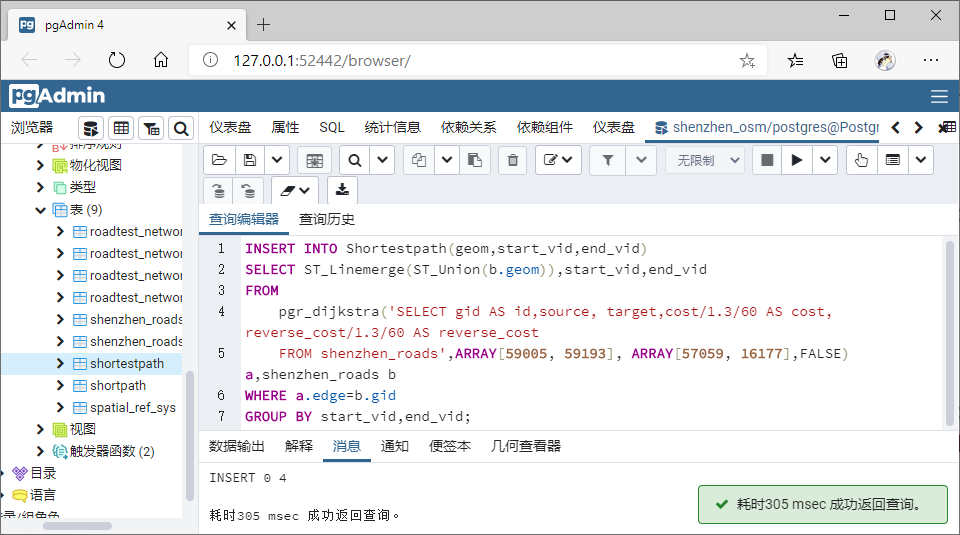
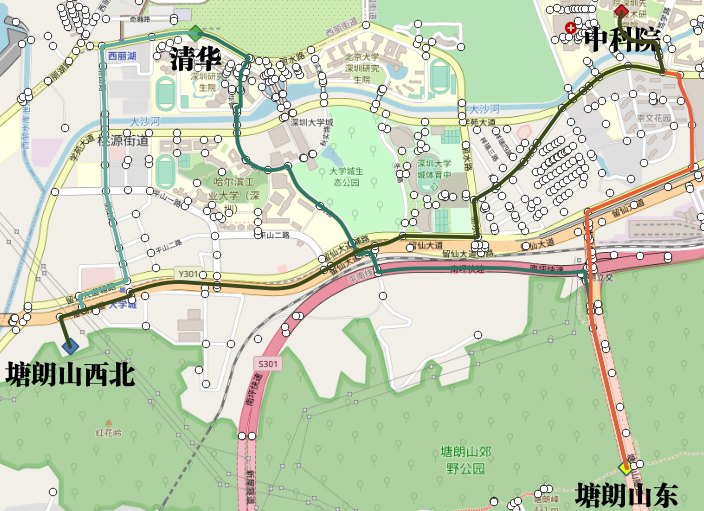
Ex4: 多个行人到不同的目的地(多到多)
两个同学,一个从清华出发去塘朗山郊野公园西和中科院,一个从中科院出发去清华和塘朗山郊野公园东。使用行人的步行时间作为权重(最短时间),不过单位是分钟。行人的步行速度为
speed = 1.3 m/s,所以步行时间t = distance / speed / 60mintues。
SELECT * FROM pgr_dijkstra(
'SELECT gid AS id,
source, target,
cost/1.3/60 AS cost, reverse_cost/1.3/60 AS reverse_cost
FROM shenzhen_roads',
ARRAY[59005, 59193], ARRAY[57059, 16177],
directed := FALSE
);
可视化:
4.2 基于车辆的有向路径查询,考虑不同优先级方式。
【预备知识】车辆路径规划一般与行人路径规划不同:
①车辆道路是有方向的
②成本(代价)可以是:距离、时间、花销、二氧化碳排放量、车辆耗损等
③在双向道路上必须同时考虑cost 和reverse_cost 属性
成本应该和 cost 属性相同或和 reverse_cost 属性相同、同一条道路的cost 和
reverse_cost 可以是不同的这是因为有些道路是单向的。
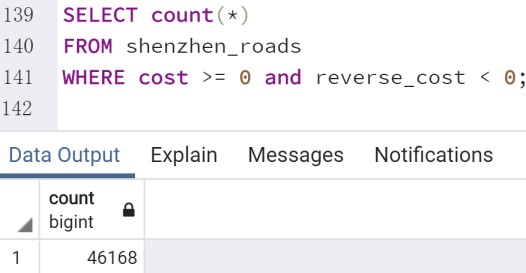
单向道路的特征是:
(source, target)路段中,cost >= 0 且 reverse_cost < 0 (target,
source)路段中,cost < 0 且 reverse_cost >= 0
所以,用 cost 属性或 reverse_cost 属性的负值表示对应方向是无效的。
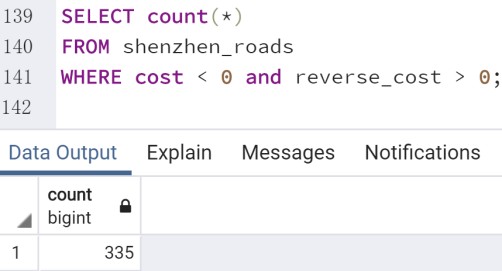
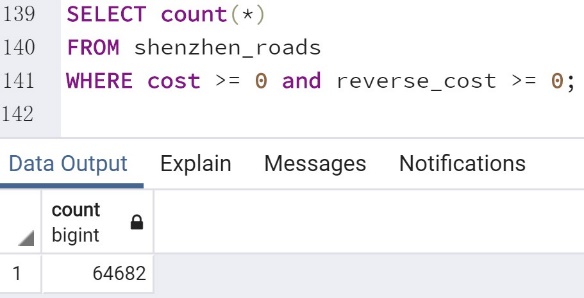
对于双向道路,cost >= 0 和reverse_cost >=
0,它们的值可能不同。例如,在一条倾斜的道路中,下山肯定比上山容易(或者更快)。成本可以是长度、时间、坡度、路面、道路类型等,也可以是多个参数的组合。
比如:深圳道路网中(source,target)单向路有 46168 条,(target,
source)单向路有 335 条,双向路有 64682 条:
增加一个目的地:深圳北站(ID:19255)

(1)无优先级的路径规划
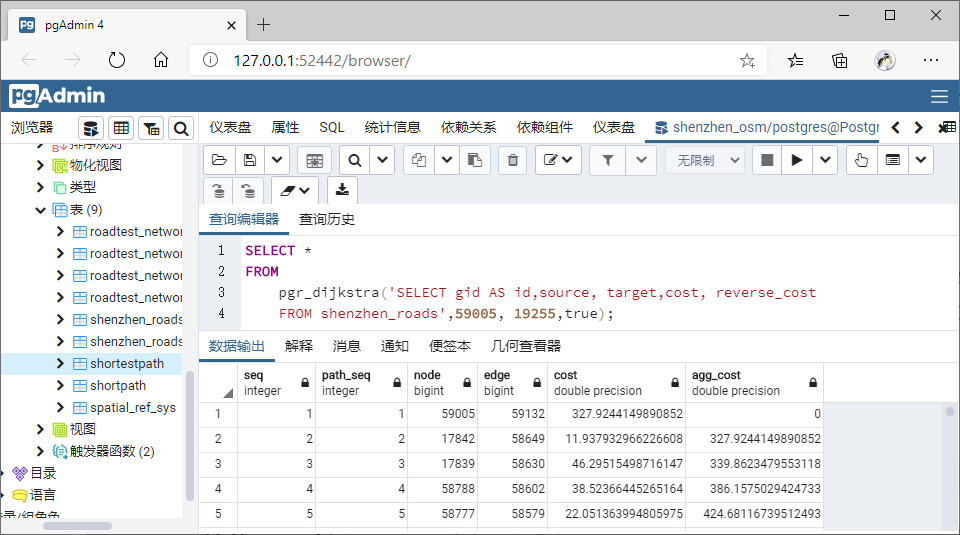
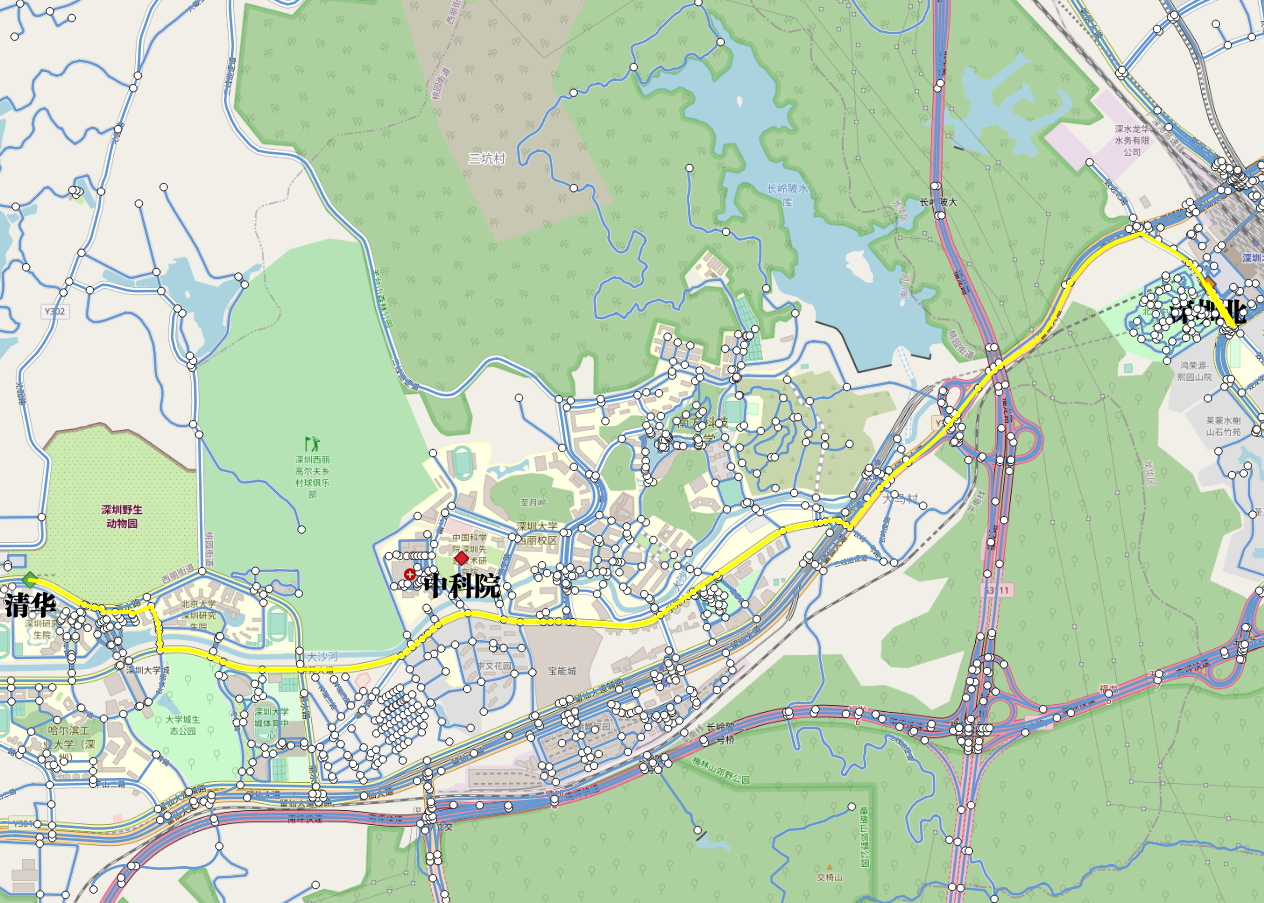
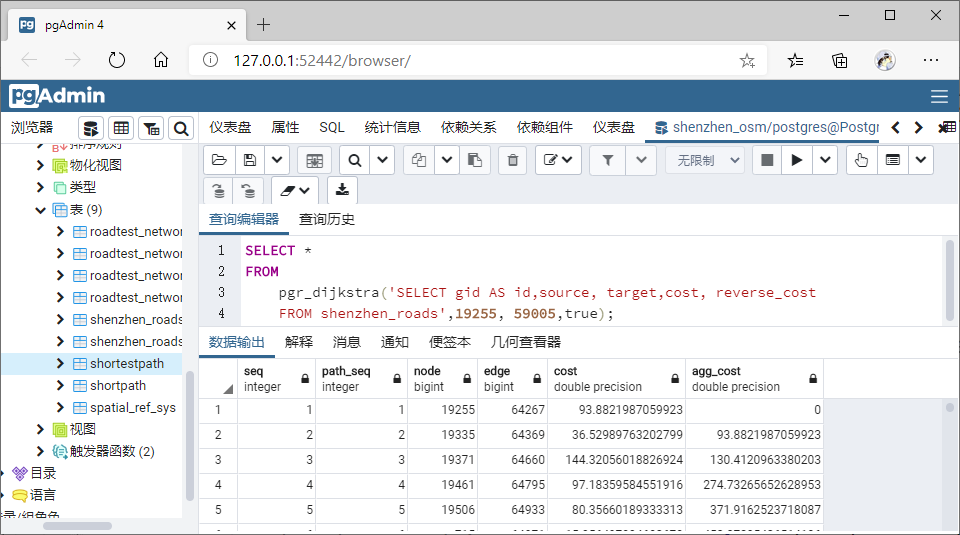
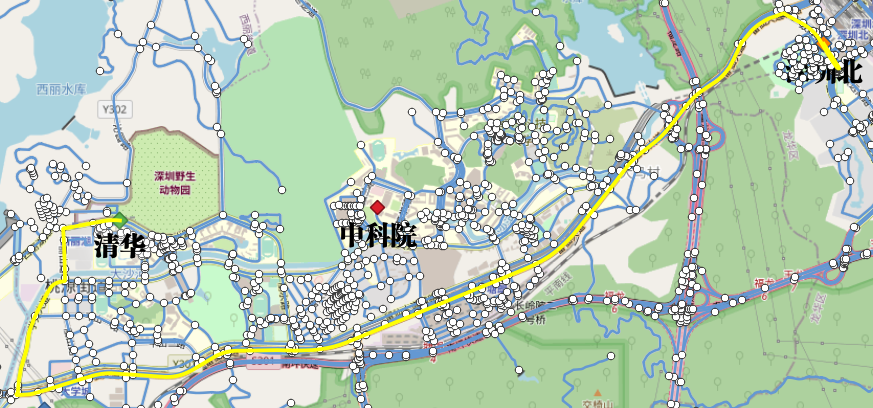
Ex1:行车路径(出发),从清华去深圳北站。
使用cost和reverse_cost列,它们的单位为米。
SELECT * FROM pgr_dijkstra(
'SELECT gid AS id,
source, target,
cost, reverse_cost
FROM shenzhen_roads
',
59005, 19255,
directed := true
);
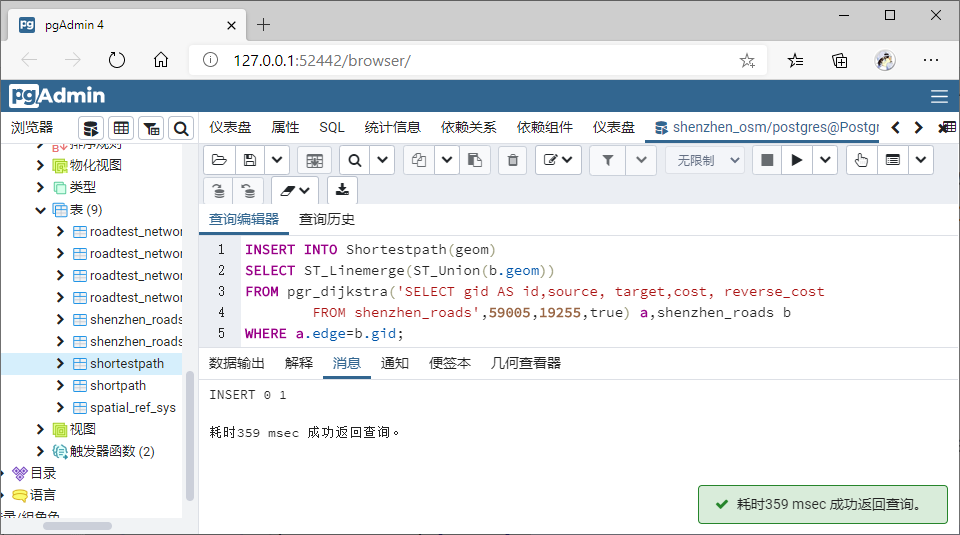
可视化:
Ex2:行车路径(返回),从深圳北站回清华。
SELECT * FROM pgr_dijkstra(
'SELECT gid AS id,
source, target,
cost, reverse_cost
FROM shenzhen_roads
',
19255, 59005,
directed := true
);
可视化

(2)具备优先级的道路路径规划问题
在处理数据时,了解所使用的数据类型可以顾及更多因素,从而得到更理想的结果。例如,如果我们知道某条路径是行人路径(pedestrian),就应该让车辆尽量避免或禁止在该路径上行驶。
因此,我们为道路表增加一列属性,去标记不同道路行走的优先级。
现在添加一个penalty 列用于保存每条路径的优先级信息(penalty
值越小,优先级越高):
ALTER TABLE shenzhen_roads ADD COLUMN penalty DOUBLE PRECISION;
初始值都为 1.0,表明所有道路具备同等优先级别。
UPDATE shenzhen_roads SET penalty = 1.0;
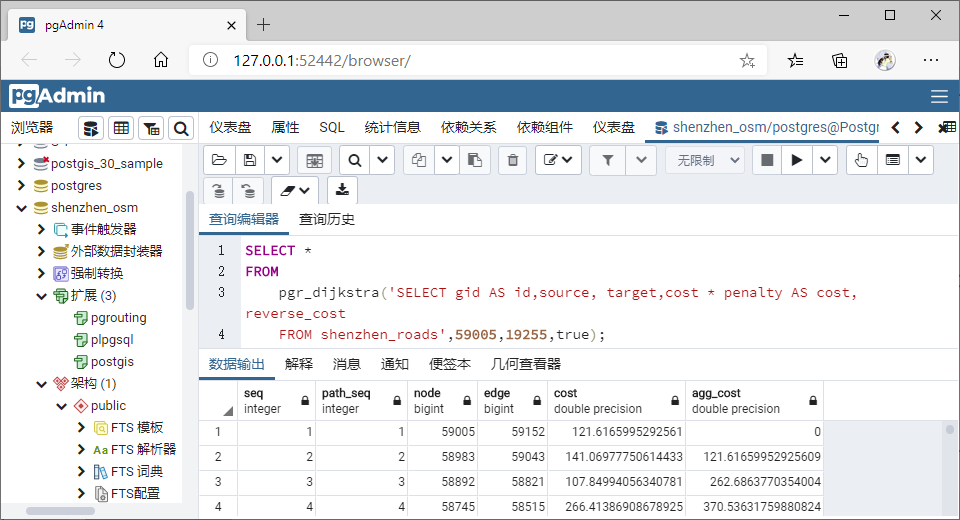
Ex3:基于无优先级路径查询乘车从清华至深圳北站(将 cost * penalty
作为正向路径成本)。
SELECT * FROM pgr_dijkstra(
'SELECT gid AS id,
source, target,
cost * penalty AS cost,
reverse_cost
FROM shenzhen_roads
',
59005, 19255,
directed := true
);
查询的结果路径和 Ex1 的结果路径一致:
Ex4:具有优先级路径查询乘车从清华至深圳北站。
因为业务场景是查找车辆的行驶路径,所以可以让路径的优先级符合以下规则:
-
禁止在pedestrian、footway、steps、cycleway、track这些路径上行驶。
-
不鼓励在rsidential路径上行驶。
-
鼓励在primary、primary_link路径上行驶。
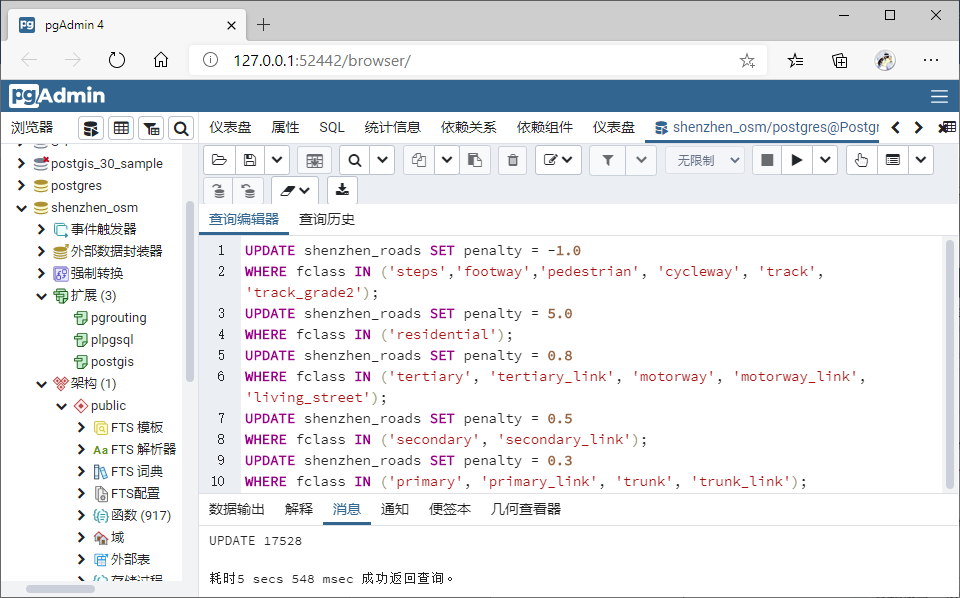
修改路径的优先级具体如下:
UPDATE shenzhen_roads SET penalty **= -**1.0
WHERE fclass IN ('steps','footway','pedestrian', 'cycleway', 'track',
'track_grade2');
UPDATE shenzhen_roads SET penalty = 5.0
WHERE fclass IN ('residential');
UPDATE shenzhen_roads SET penalty = 0.8
WHERE fclass IN ('tertiary', 'tertiary_link', 'motorway',
'motorway_link', 'living_street');
UPDATE shenzhen_roads SET penalty = 0.5
WHERE fclass IN ('secondary', 'secondary_link');
UPDATE shenzhen_roads SET penalty = 0.3
WHERE fclass IN ('primary', 'primary_link', 'trunk', 'trunk_link');
重新查询路径:
可视化:
**4.3习题
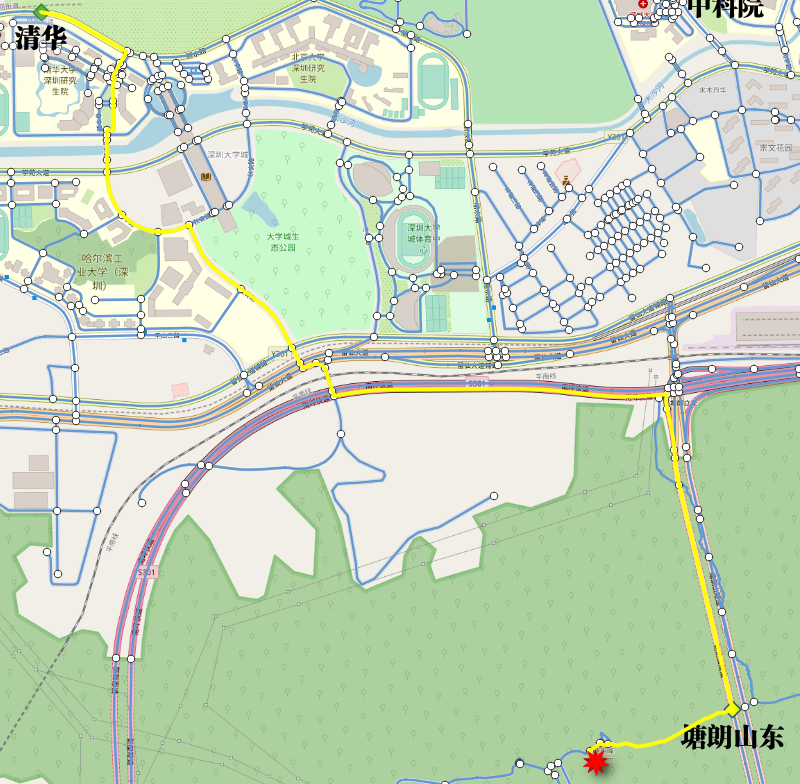
某同学在塘朗山郊野公园,通过手机定位给你发送了一个位置信息(12688302.5,2580759.8@EPSG:3857),你当前在清华宿舍休息,如果你通过导航去找你同学(步行或自驾均可),请给出最优路径(考虑距离最短或耗时最短)。**
查询清华所在坐标
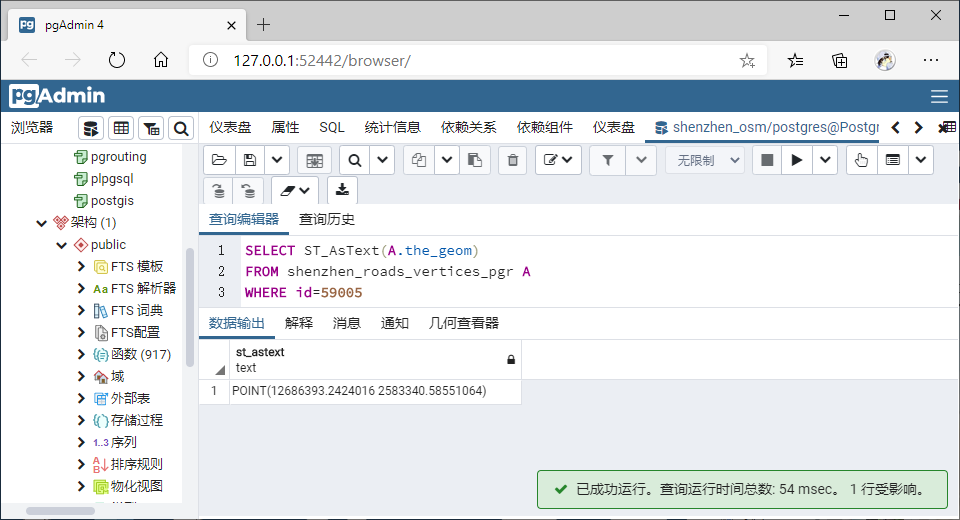
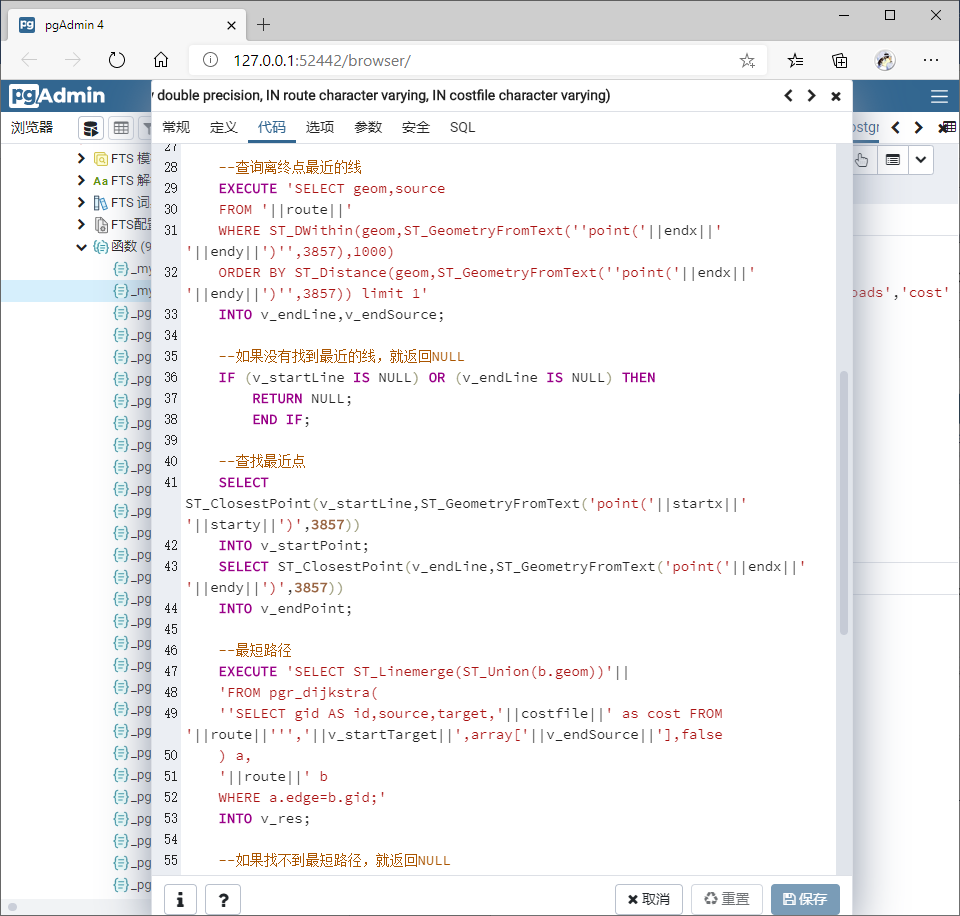
自定义函数
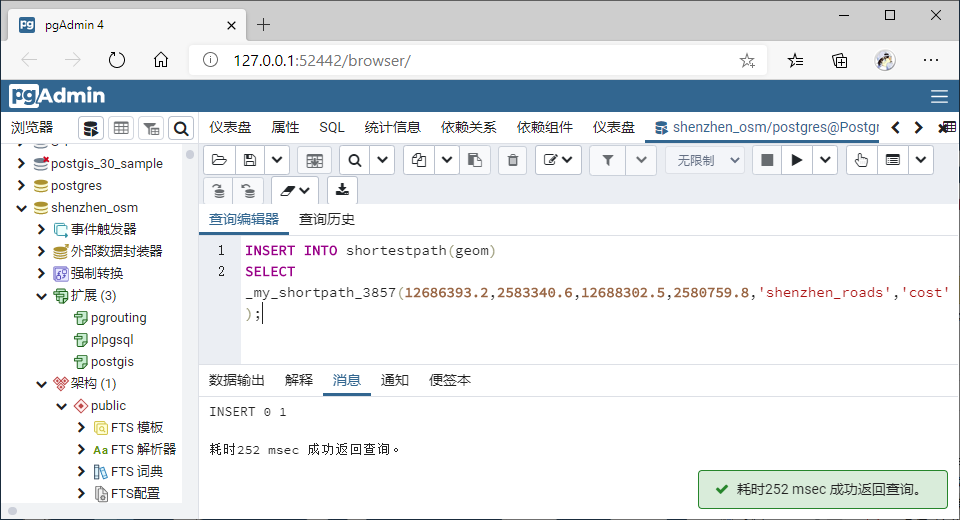
查询距离最短路径
在QGIS中查看
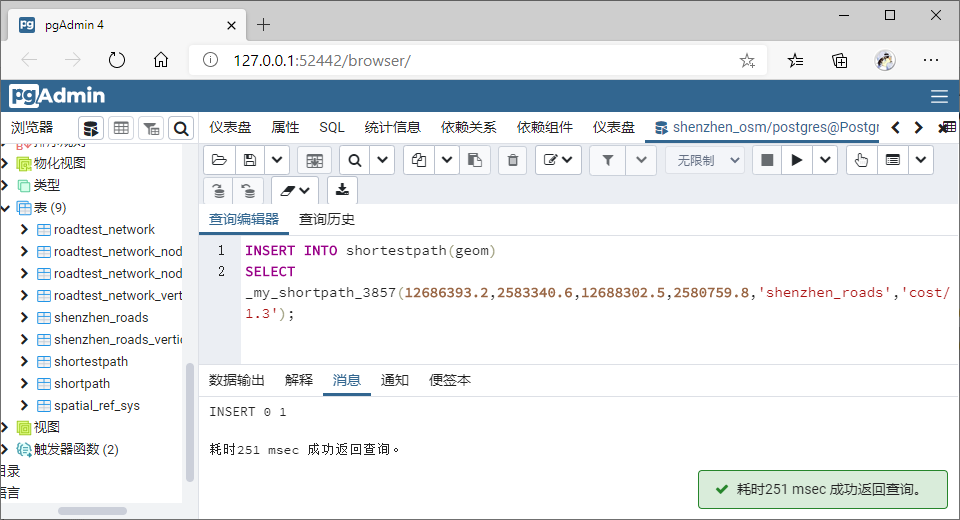
查询耗时最短路径
在QGIS中查看
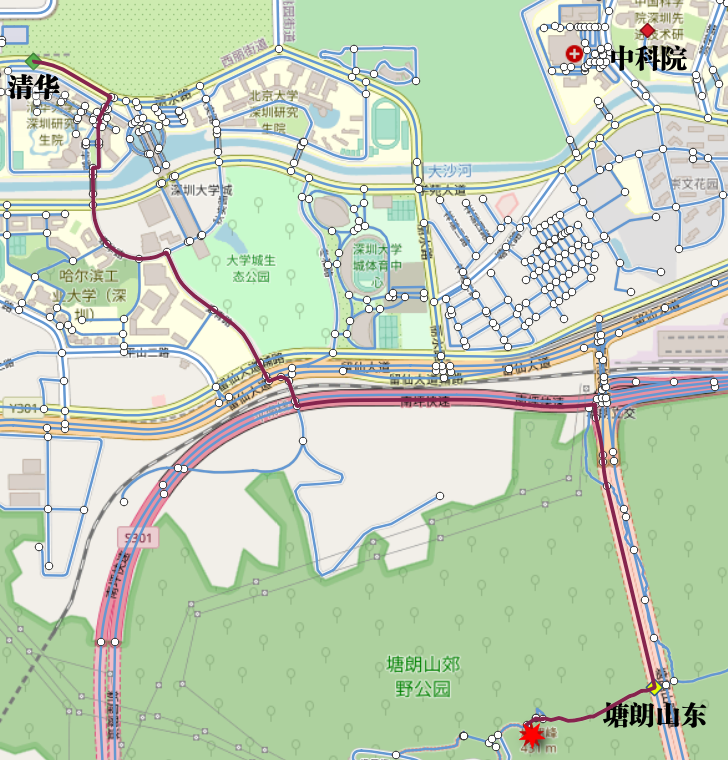
查询考虑道路优先级路径
在QGIS中查看

SQL代码
--加载扩展
CREATE EXTENSION postgis;
CREATE EXTENSION pgrouting;
--创建表
CREATE TABLE Roadtest_Network (
id serial PRIMARY KEY,
name text,
source integer,
target integer,
geom geometry(LineString, 4326),
len double precision
);
--插入数据
INSERT INTO Roadtest_Network(id,name,geom)
VALUES
(1,'A',ST_GeomFromText('LineString(00 20, 10 20)',4326)),
(2,'B',ST_GeomFromText('LineString(10 20, 10 02)',4326)),
(3,'C',ST_GeomFromText('LineString(10 02, 20 02)',4326)),
(4,'D',ST_GeomFromText('LineString(00 05, 20 05)',4326)),
(5,'E',ST_GeomFromText('LineString(20 4.9999, 20 2.0001)',4326));
Update roadtest_network
Set len = ST_Length(geom);
--创建拓扑
SELECT pgr_createTopology('roadtest_network',0.00001,'geom','id','source','target','true');
--拓扑分析
SELECT pgr_analyzeGraph('roadtest_network',0.00001,'geom','id','source','target','true');
--节点重构
SELECT pgr_nodeNetwork('roadtest_network',0.00001,'id','geom','noded')
--基于重构的节点创建拓扑
SELECT pgr_createTopology('roadtest_network_noded',0.00001,'geom','id','source','target','true');
--进行新的拓扑分析
SELECT pgr_analyzeGraph('roadtest_network_noded',0.00001,'geom','id','source','target','true');
--更新表
DELETE FROM roadtest_network;
INSERT INTO roadtest_network(source,target,geom)
VALUES
(SELECT source,target,geom
FROM roadtest_network_noded);
--插入路F
INSERT INTO Roadtest_Network(id,name,geom)
VALUES
(8,'F',ST_GeomFromText('LineString(00 05, 10 20)',4326));
Update roadtest_network
Set len = ST_Length(geom);
SELECT pgr_createTopology('roadtest_network',0.00001,'geom','id','source','target','true');
--查询5-3最短路径
SELECT *
FROM pgr_dijkstra('SELECT id,source,target,len as cost FROM Roadtest_network',5,3,false);
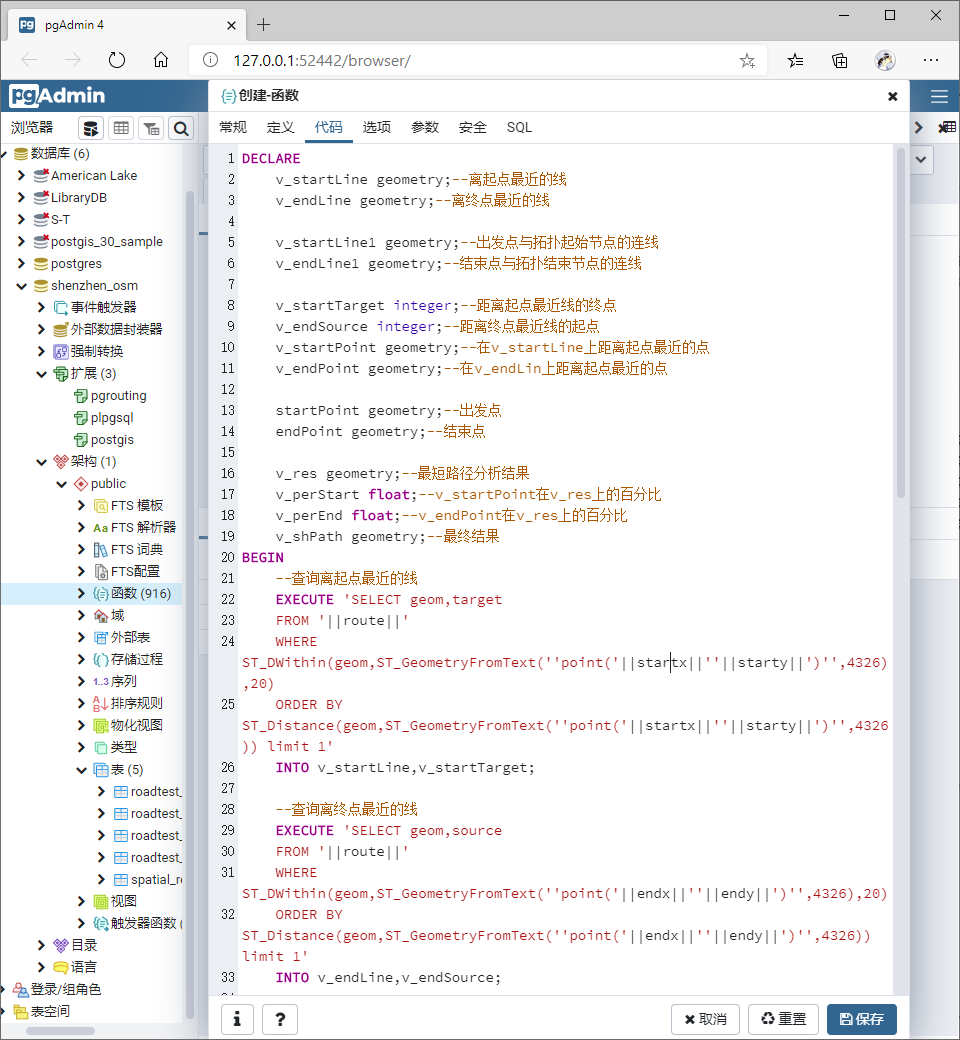
--自定义函数
DECLARE
v_startLine geometry;--离起点最近的线
v_endLine geometry;--离终点最近的线
v_startLine1 geometry;--出发点与拓扑起始节点的连线
v_endLine1 geometry;--结束点与拓扑结束节点的连线
v_startTarget integer;--距离起点最近线的终点
v_endSource integer;--距离终点最近线的起点
v_startPoint geometry;--在v_startLine上距离起点最近的点
v_endPoint geometry;--在v_endLin上距离起点最近的点
startPoint geometry;--出发点
endPoint geometry;--结束点
v_res geometry;--最短路径分析结果
v_perStart float;--v_startPoint在v_res上的百分比
v_perEnd float;--v_endPoint在v_res上的百分比
v_shPath geometry;--最终结果
BEGIN
--查询离起点最近的线
EXECUTE 'SELECT geom,target
FROM '||route||'
WHERE ST_DWithin(geom,ST_GeometryFromText(''point('||startx||' '||starty||')'',4326),20)
ORDER BY ST_Distance(geom,ST_GeometryFromText(''point('||startx||' '||starty||')'',4326)) limit 1'
INTO v_startLine,v_startTarget;
--查询离终点最近的线
EXECUTE 'SELECT geom,source
FROM '||route||'
WHERE ST_DWithin(geom,ST_GeometryFromText(''point('||endx||' '||endy||')'',4326),20)
ORDER BY ST_Distance(geom,ST_GeometryFromText(''point('||endx||' '||endy||')'',4326)) limit 1'
INTO v_endLine,v_endSource;
--如果没有找到最近的线,就返回NULL
IF (v_startLine IS NULL) OR (v_endLine IS NULL) THEN
RETURN NULL;
END IF;
--查找最近点
SELECT ST_ClosestPoint(v_startLine,ST_GeometryFromText('point('||startx||' '||starty||')',4326))
INTO v_startPoint;
SELECT ST_ClosestPoint(v_endLine,ST_GeometryFromText('point('||endx||' '||endy||')',4326))
INTO v_endPoint;
--最短路径
EXECUTE 'SELECT ST_Linemerge(ST_Union(b.geom))'||
'FROM pgr_dijkstra(
''SELECT id,source,target,'||costfile||' as cost FROM '||route||''','||v_startTarget||',array['||v_endSource||'],false
) a,
'||route||' b
WHERE a.edge=b.id;'
INTO v_res;
--如果找不到最短路径,就返回NULL
IF(v_res IS NULL) THEN
RETURN NULL;
END IF;
--将v_res,v_startLine,v_endLine进行拼接
SELECT ST_Linemerge(ST_Union(array[v_res,v_startLine,v_endLine])) INTO v_res;
SELECT ST_LineLocatePoint(v_res,v_startPoint) INTO v_perStart;
SELECT ST_LineLocatePoint(v_res,v_endPoint) INTO v_perEnd;
--截取v_res
SELECT ST_SetSRID(ST_MakePoint(startx,starty),4326) INTO startPoint;
SELECT ST_SetSRID(ST_MakePoint(endx,endy),4326) INTO endPoint;
IF V_perStart < V_perEnd THEN
SELECT ST_LineSubString(v_res,v_perStart,v_perEnd) INTO v_shPath;
SELECT ST_MakeLine(ST_StartPoint(v_shPath),startpoint) INTO v_startLine1;
SELECT ST_MakeLine(ST_EndPoint(v_shPath),endpoint) INTO v_endLine1;
ELSE
SELECT ST_LineSubString(v_res,V_perEnd,v_perStart) INTO v_shPath;
SELECT ST_MakeLine(ST_EndPoint(v_shPath),startpoint) INTO v_startLine1;
SELECT ST_MakeLine(ST_StartPoint(v_shPath),endpoint) INTO v_endLine1;
END IF;
SELECT ST_Union(array[v_shPath,v_startLine1,v_endLine1]) INTO v_shPath;
RETURN v_shPath;
END;
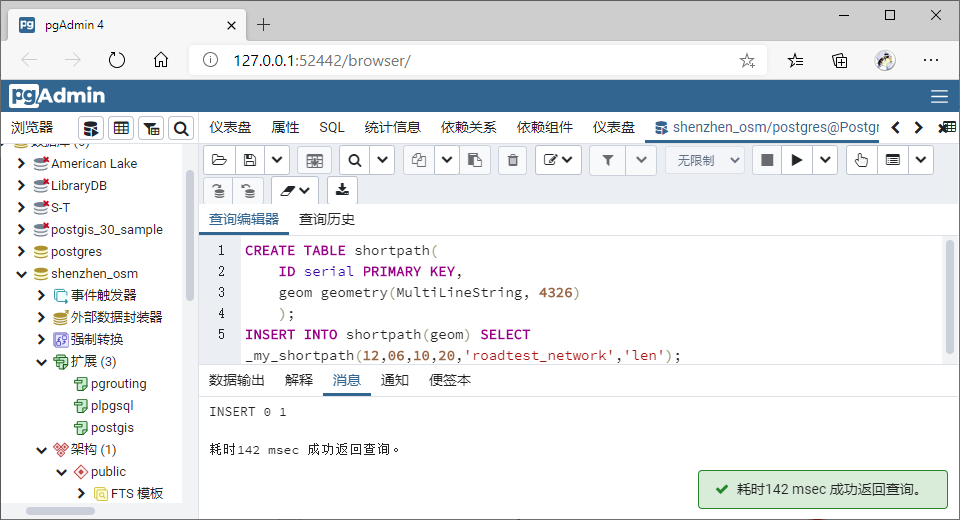
--查询最短路线
CREATE TABLE shortpath(
ID serial PRIMARY KEY,
geom geometry(MultiLineString, 4326)
);
INSERT INTO shortpath(geom) SELECT _my_shortpath(12,06,10,20,'roadtest_network','len');
INSERT INTO shortpath(geom) SELECT _my_shortpath(12,06,18,04,'roadtest_network','len');
--添加字段
ALTER TABLE shenzhen_roads
ADD COLUMN source INTEGER,
ADD COLUMN target INTEGER,
ADD COLUMN cost DOUBLE PRECISION,
ADD COLUMN reverse_cost DOUBLE PRECISION;
--①正向路径的成本:
UPDATE shenzhen_roads
SET cost = ST_Length(geom),
reverse_cost = -1
WHERE oneway = 'F';
--②反向路径的成本:
UPDATE shenzhen_roads
SET cost = -1,
reverse_cost = ST_Length(geom)
WHERE oneway = 'T';
--③双向路径的成本:
UPDATE shenzhen_roads
SET cost = ST_Length(geom),
reverse_cost = ST_Length(geom)
WHERE oneway = 'B';
--创建拓扑
SELECT pgr_createTopology(
'shenzhen_roads',
0.001,
'geom',
'gid',
'source',
'target'
);
--拓扑查错
SELECT pgr_analyzeGraph('shenzhen_roads',0.001,'geom','gid','source','target');
--4.1.1
SELECT *
FROM
pgr_dijkstra('SELECT gid AS id,source, target,cost, reverse_cost
FROM shenzhen_roads',59005, 59193,FALSE);
CREATE TABLE Shortestpath(
ID serial PRIMARY KEY,
start_vid bigint,
end_vid bigint,
geom geometry(LineString,3857)
);
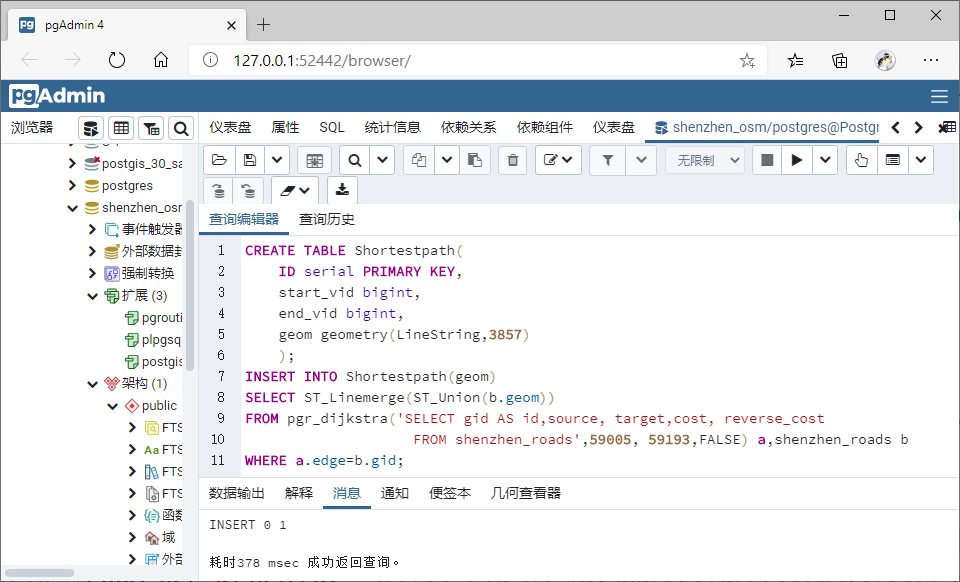
INSERT INTO Shortestpath(geom)
SELECT ST_Linemerge(ST_Union(b.geom))
FROM pgr_dijkstra('SELECT gid AS id,source, target,cost, reverse_cost
FROM shenzhen_roads',59005, 59193,FALSE) a,shenzhen_roads b
WHERE a.edge=b.gid;
--4.1.2
SELECT *
FROM
pgr_dijkstra( 'SELECT gid AS id,source,target,cost,reverse_cost
FROM shenzhen_roads', ARRAY[59005, 16177], 59193,FALSE);
INSERT INTO Shortestpath(geom,start_vid)
SELECT ST_Linemerge(ST_Union(b.geom)),start_vid
FROM pgr_dijkstra( 'SELECT gid AS id,source,target,cost,reverse_cost
FROM shenzhen_roads', ARRAY[59005, 16177], 59193,FALSE) a,shenzhen_roads b
WHERE a.edge=b.gid
GROUP BY start_vid;
--4.1.3
SELECT *
FROM
pgr_dijkstra('SELECT gid AS id,source, target,cost/1.3 AS cost, reverse_cost/1.3 AS reverse_cost
FROM shenzhen_roads',16177, ARRAY[59005,59193],FALSE);
INSERT INTO Shortestpath(geom,end_vid)
SELECT ST_Linemerge(ST_Union(b.geom)),end_vid
FROM
pgr_dijkstra('SELECT gid AS id,source, target,cost/1.3 AS cost, reverse_cost/1.3 AS reverse_cost
FROM shenzhen_roads',16177, ARRAY[59005,59193],FALSE) a,shenzhen_roads b
WHERE a.edge=b.gid
GROUP BY end_vid;
--4.1.4
SELECT *
FROM
pgr_dijkstra('SELECT gid AS id,source, target,cost/1.3/60 AS cost, reverse_cost/1.3/60 AS reverse_cost
FROM shenzhen_roads',ARRAY[59005, 59193], ARRAY[57059, 16177],FALSE);
INSERT INTO Shortestpath(geom,start_vid,end_vid)
SELECT ST_Linemerge(ST_Union(b.geom)),start_vid,end_vid
FROM
pgr_dijkstra('SELECT gid AS id,source, target,cost/1.3/60 AS cost, reverse_cost/1.3/60 AS reverse_cost
FROM shenzhen_roads',ARRAY[59005, 59193], ARRAY[57059, 16177],FALSE) a,shenzhen_roads b
WHERE a.edge=b.gid
GROUP BY start_vid,end_vid;
--4.2.1
SELECT *
FROM
pgr_dijkstra('SELECT gid AS id,source, target,cost, reverse_cost
FROM shenzhen_roads',59005, 19255,true);
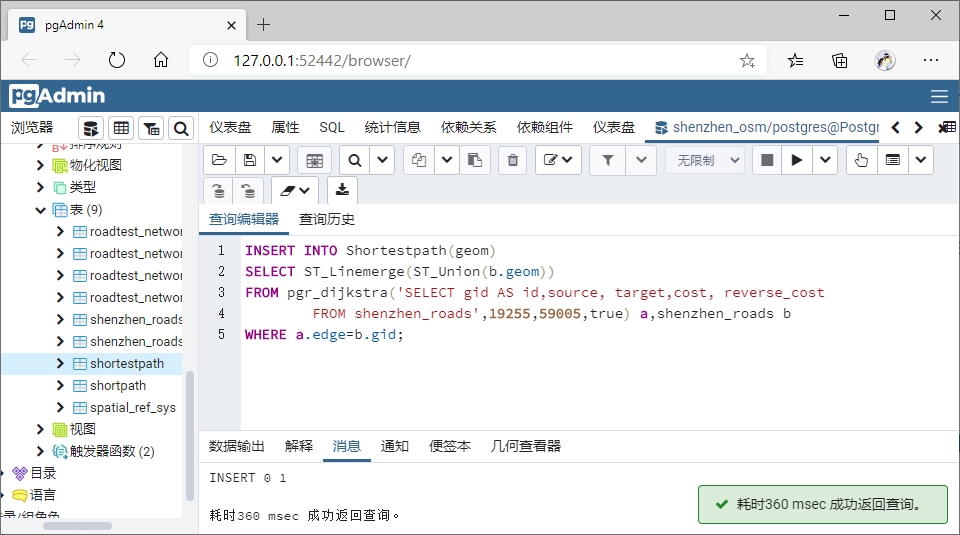
INSERT INTO Shortestpath(geom)
SELECT ST_Linemerge(ST_Union(b.geom))
FROM pgr_dijkstra('SELECT gid AS id,source, target,cost, reverse_cost
FROM shenzhen_roads',59005,19255,true) a,shenzhen_roads b
WHERE a.edge=b.gid;
--4.2.2
SELECT *
FROM
pgr_dijkstra('SELECT gid AS id,source, target,cost, reverse_cost
FROM shenzhen_roads',19255, 59005,true);
INSERT INTO Shortestpath(geom)
SELECT ST_Linemerge(ST_Union(b.geom))
FROM pgr_dijkstra('SELECT gid AS id,source, target,cost, reverse_cost
FROM shenzhen_roads',19255,59005,true) a,shenzhen_roads b
WHERE a.edge=b.gid;
--4.2.3
SELECT *
FROM
pgr_dijkstra('SELECT gid AS id,source, target,cost * penalty AS cost, reverse_cost
FROM shenzhen_roads',59005,19255,true);
--4.2.4
UPDATE shenzhen_roads SET penalty = -1.0
WHERE fclass IN ('steps','footway','pedestrian', 'cycleway', 'track', 'track_grade2');
UPDATE shenzhen_roads SET penalty = 5.0
WHERE fclass IN ('residential');
UPDATE shenzhen_roads SET penalty = 0.8
WHERE fclass IN ('tertiary', 'tertiary_link', 'motorway', 'motorway_link', 'living_street');
UPDATE shenzhen_roads SET penalty = 0.5
WHERE fclass IN ('secondary', 'secondary_link');
UPDATE shenzhen_roads SET penalty = 0.3
WHERE fclass IN ('primary', 'primary_link', 'trunk', 'trunk_link');
SELECT *
FROM
pgr_dijkstra('SELECT gid AS id,source, target,cost * penalty AS cost, reverse_cost
FROM shenzhen_roads',59005,19255,true);
INSERT INTO Shortestpath(geom)
SELECT ST_Linemerge(ST_Union(b.geom))
FROM pgr_dijkstra('SELECT gid AS id,source, target,cost * penalty AS cost, reverse_cost
FROM shenzhen_roads',59005,19255,true) a,shenzhen_roads b
WHERE a.edge=b.gid;
--
DECLARE
v_startLine geometry;--离起点最近的线
v_endLine geometry;--离终点最近的线
v_startLine1 geometry;--出发点与拓扑起始节点的连线
v_endLine1 geometry;--结束点与拓扑结束节点的连线
v_startTarget integer;--距离起点最近线的终点
v_endSource integer;--距离终点最近线的起点
v_startPoint geometry;--在v_startLine上距离起点最近的点
v_endPoint geometry;--在v_endLin上距离起点最近的点
startPoint geometry;--出发点
endPoint geometry;--结束点
v_res geometry;--最短路径分析结果
v_perStart float;--v_startPoint在v_res上的百分比
v_perEnd float;--v_endPoint在v_res上的百分比
v_shPath geometry;--最终结果
BEGIN
--查询离起点最近的线
EXECUTE 'SELECT geom,target
FROM '||route||'
WHERE ST_DWithin(geom,ST_GeometryFromText(''point('||startx||' '||starty||')'',3857),1000)
ORDER BY ST_Distance(geom,ST_GeometryFromText(''point('||startx||' '||starty||')'',3857)) limit 1'
INTO v_startLine,v_startTarget;
--查询离终点最近的线
EXECUTE 'SELECT geom,source
FROM '||route||'
WHERE ST_DWithin(geom,ST_GeometryFromText(''point('||endx||' '||endy||')'',3857),1000)
ORDER BY ST_Distance(geom,ST_GeometryFromText(''point('||endx||' '||endy||')'',3857)) limit 1'
INTO v_endLine,v_endSource;
--如果没有找到最近的线,就返回NULL
IF (v_startLine IS NULL) OR (v_endLine IS NULL) THEN
RETURN NULL;
END IF;
--查找最近点
SELECT ST_ClosestPoint(v_startLine,ST_GeometryFromText('point('||startx||' '||starty||')',3857))
INTO v_startPoint;
SELECT ST_ClosestPoint(v_endLine,ST_GeometryFromText('point('||endx||' '||endy||')',3857))
INTO v_endPoint;
--最短路径
EXECUTE 'SELECT ST_Linemerge(ST_Union(b.geom))'||
'FROM pgr_dijkstra(
''SELECT gid AS id,source,target,'||costfile||' as cost FROM '||route||''','||v_startTarget||',array['||v_endSource||'],false
) a,
'||route||' b
WHERE a.edge=b.gid;'
INTO v_res;
--如果找不到最短路径,就返回NULL
IF(v_res IS NULL) THEN
RETURN NULL;
END IF;
--将v_res,v_startLine,v_endLine进行拼接
SELECT ST_Linemerge(ST_Union(array[v_res,v_startLine,v_endLine])) INTO v_res;
SELECT ST_LineLocatePoint(v_res,v_startPoint) INTO v_perStart;
SELECT ST_LineLocatePoint(v_res,v_endPoint) INTO v_perEnd;
--截取v_res
SELECT ST_SetSRID(ST_MakePoint(startx,starty),3857) INTO startPoint;
SELECT ST_SetSRID(ST_MakePoint(endx,endy),3857) INTO endPoint;
IF V_perStart < V_perEnd THEN
SELECT ST_LineSubString(v_res,v_perStart,v_perEnd) INTO v_shPath;
SELECT ST_MakeLine(ST_StartPoint(v_shPath),startpoint) INTO v_startLine1;
SELECT ST_MakeLine(ST_EndPoint(v_shPath),endpoint) INTO v_endLine1;
ELSE
SELECT ST_LineSubString(v_res,V_perEnd,v_perStart) INTO v_shPath;
SELECT ST_MakeLine(ST_EndPoint(v_shPath),startpoint) INTO v_startLine1;
SELECT ST_MakeLine(ST_StartPoint(v_shPath),endpoint) INTO v_endLine1;
END IF;
SELECT ST_Linemerge(ST_Union(array[v_shPath,v_startLine1,v_endLine1])) INTO v_shPath;
RETURN v_shPath;
END;
INSERT INTO shortestpath(geom) SELECT _my_shortpath_3857(12686393.2,2583340.6,12688302.5,2580759.8,'shenzhen_roads','cost');
INSERT INTO shortestpath(geom) SELECT _my_shortpath_3857(12686393.2,2583340.6,12688302.5,2580759.8,'shenzhen_roads','cost/1.3');
INSERT INTO shortestpath(geom) SELECT _my_shortpath_3857(12686393.2,2583340.6,12688302.5,2580759.8,'shenzhen_roads','cost* penalty');