遥感地学实验:面向对象的遥感影像分类
一、实验要求
面向对象分类技术是集合邻近像元为对象用来识别感兴趣的光谱要素,充分利用高分辨率的全色和多光谱数据的空间、纹理和光谱信息来分割和分类,以高精度的分类结果或者矢量输出。从高分辨率全色或者多光谱数据中提取信息,ENVI
FX可以提取各种特征地物,如车辆、建筑、道路、桥、河流、湖泊以及田地等。可以在操作过程中随时预览影像分割效果。
二、实验目标
(1)掌握面向对象的遥感影像分类原理。
(2)掌握基于规则的面向对象信息提取方法。
(3)理解分割尺度与分类精度的关系。
三、实验数据
qb_colorado.img(0.6m分辨率的QuickBird图像)
四、实验步骤
(一)发现对象
1.启动Rule Based FX工具
(1)在主界面中选择File(文件)-Open(打开),打开图像文件“qb_colorado.img”。
(2)在Toolbox工具箱中,双击Feature Extraction/Rule Based Feature Extraction
Work-flow(面向对象/基于规则面向对象工作流程)工具,启动Feature Extraction -
Rule Based(面向对象特征提取–基于规则提取)流程化工具面板。
(3)在Data Selection(选择数据)步骤中,有4个选项卡。
(4)单击Input
Raster(输入栅格)选项卡,单击Browse(浏览)按钮,在弹出对话框中选择“qb_colorado.img”。

(5)单击Custom Bands(自定义波段)选项卡,在“Band 1”右侧下拉列表中选择Band
3,在“Band 2”右侧下拉列表中选择Band 4,ENVI将生成“Normalized
Difference”(归一化指数)波段,可以用来进行分割和分类。

(6) 设置完毕后,单击 Next按钮,进入下一步Object Creation(创建对象)步骤。
2.图像分割与合并
(1)单击Select Segment
Bands(选择分割波段)右侧的按钮圈,可以设置分割用到的波段,默认为输入图像的所有波段。
(2)单击Select Merge
Bands右侧的按钮,可以设置合并用到的波段,默认为输入图像的所有波段。
(3)Segment Settings(分割设置)的Algorithm(算法)下方选择Edge(边缘),Scale
Level(分割尺度)滑动到40;Merge
Settings(合并设置)的Algorithm(算法)下方选择Full Lambda Schedule,Merge
Level滑动到90;
(4)在Texture Kernal
Size(纹理核大小)文本框中,可以设置纹理核大小(单位为像元)。如果数据区域较大而纹理差异较小,可以把这个参数设置得大一点。默认是3,最大是19。
(5)勾选Preview(预览)选项,在ENVI视窗中出现一个矩形的预览区。在鼠标为选择状态下,按住鼠标左键拖动预览区,按住预览区边缘拖动鼠标调整预览区大小。

(6)单击Next(下一步)按钮,进入Rule -based
Classification(基于规则图像分类)步骤。
(二)基于规则特征提取
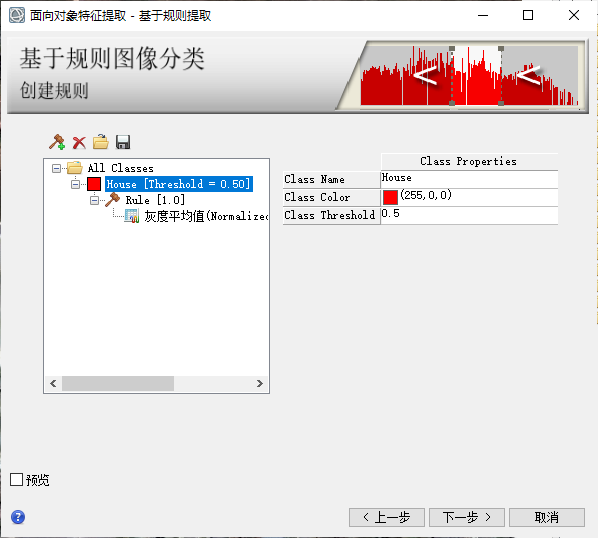
(1)在Rule - based
Classification(基于规则图像分类)步骤中,单击“+”按钮可以添加类别。在右侧的Class
Properties表格中设置以下属性:
·类名(Class Name):住宅。
·类颜色(Class Color):默认红色即可。
·类阈值(Class Threshold):默认值为0.5。根据类下面的规则和属性权重计算得到。
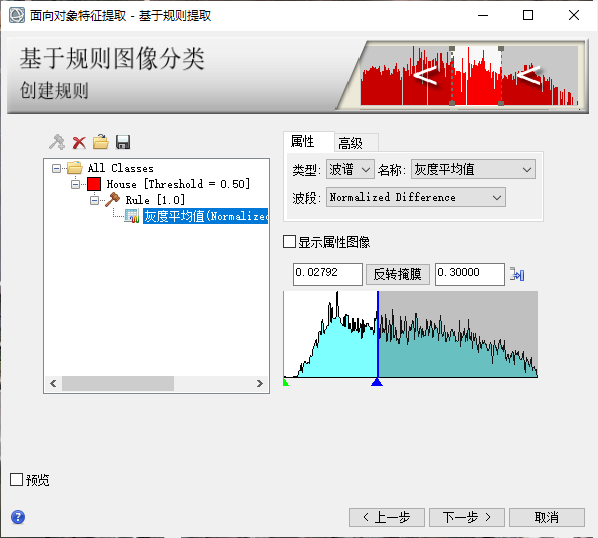
(2)添加第一条属性描述:划分植被与非植被区。使用鼠标选中Spectral
Mean(灰度平均值),输入波段(Band):选择Normalized Difference。
(3)下方的直方图中可以设置属性范围,在Invert按钮前后的文本框中可以手动输入最小和最大阈值,或使用鼠标拖拽直方图中的绿色和蓝色竖线实现阈值设置。单击Invert按钮可以反转阈值范围。单击右侧画按钮可以浮动显示直方图界面,这里设置最大值为0.3,按回车键确认。
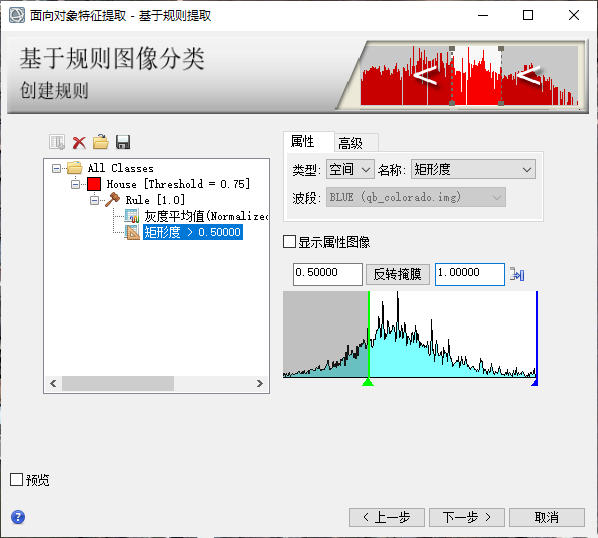
(4)添加第二条属性描述:剔除道路干扰。居住房屋和道路的最大区别在于房屋是近似矩形,可以设置Rectangular
fit(矩形度)属性。
·在Rule上右键选择Add Attibute按钮,新建一个规则。
·在右侧 Type(类型)中选择Spatial(空间)。
·在Name(名称)中选择Rectangular fit(矩形度)。
·设置值的范围是0.5~1,其他参数为默认值。
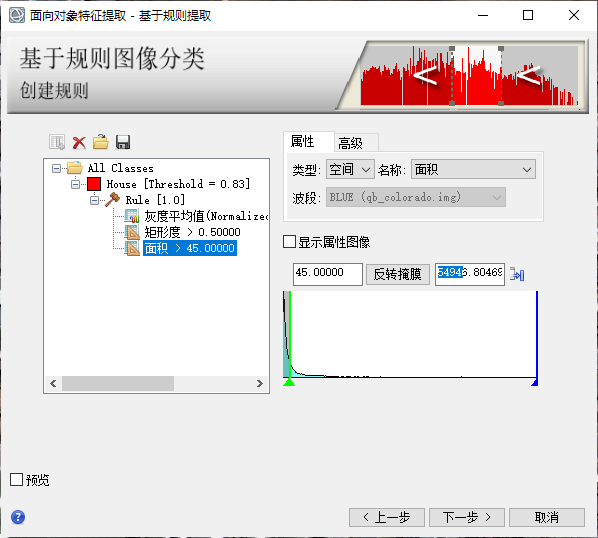
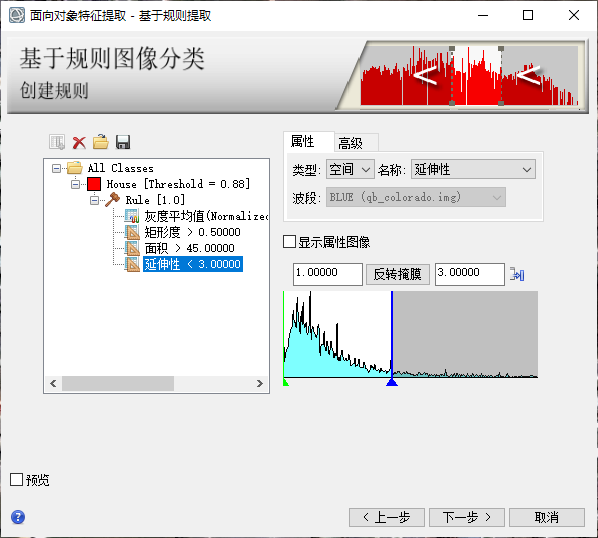
(5)同样的方法设置面积>45,以及延伸性<3。
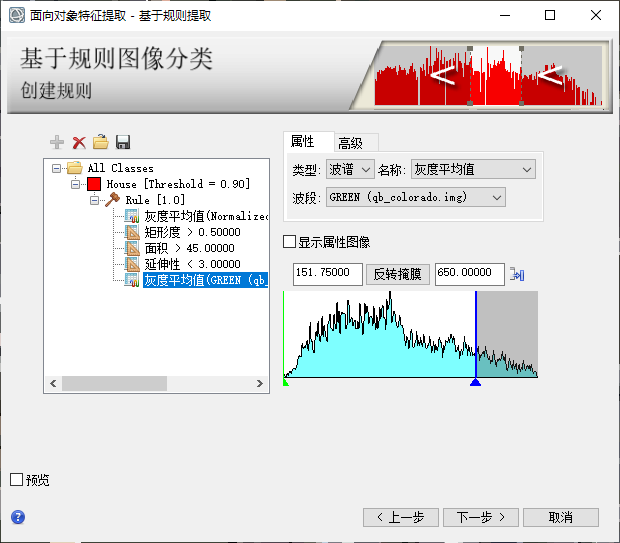
(6)剔除水泥地干扰。水泥地反射率比较高,居住房屋反射率较低,所以可以使用光谱属性。类型选择“波谱”,名称选择“灰度平均值”,波段选择“GREEN”,数值设置“<650”。
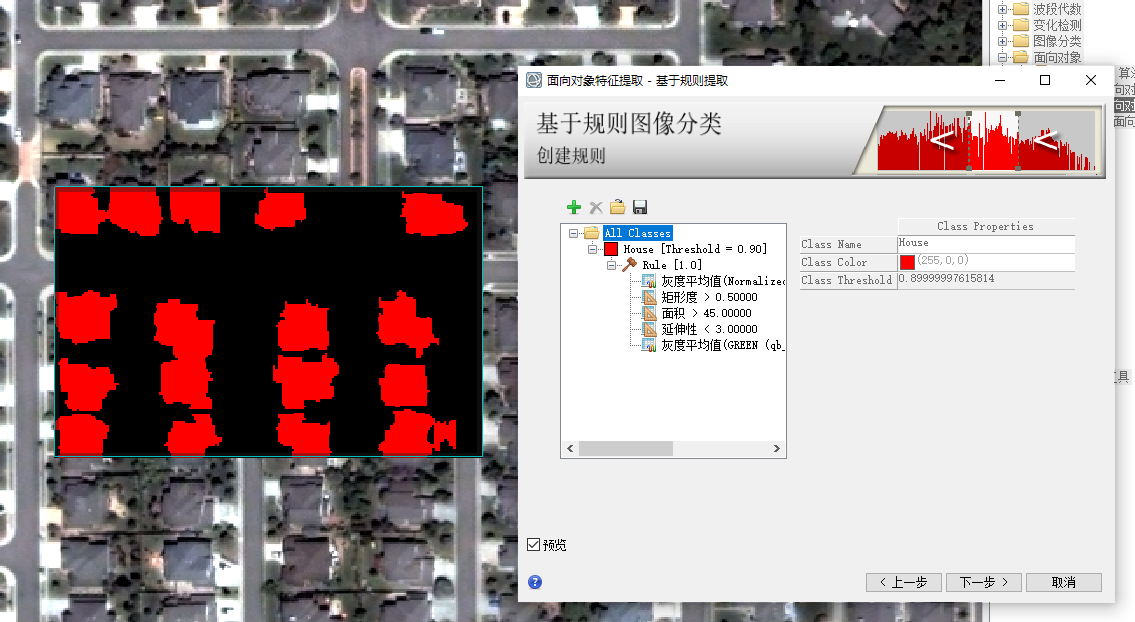
(7)单击All
Classes选项,勾选Preview选项预览最终的Rule规则提取效果。规则设置好后,单击
Next按钮进人下一步。
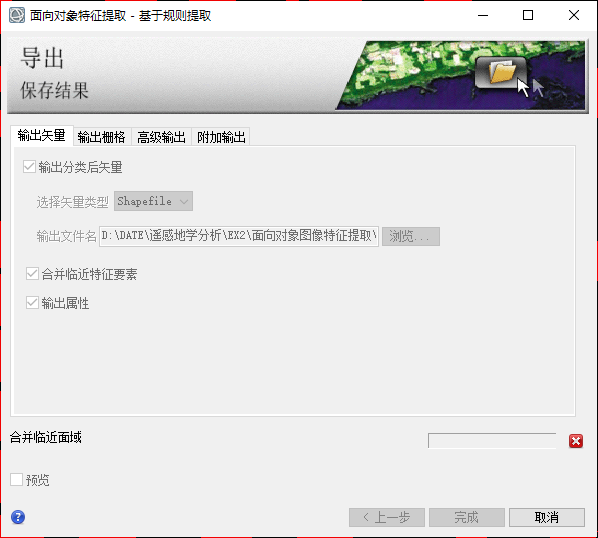
(三)输出结果
在“输出矢量”、“输出栅格”、“附加输出”中选择好合适的路径,并填写好名称,分别进行输出最后的分类结果及规则。
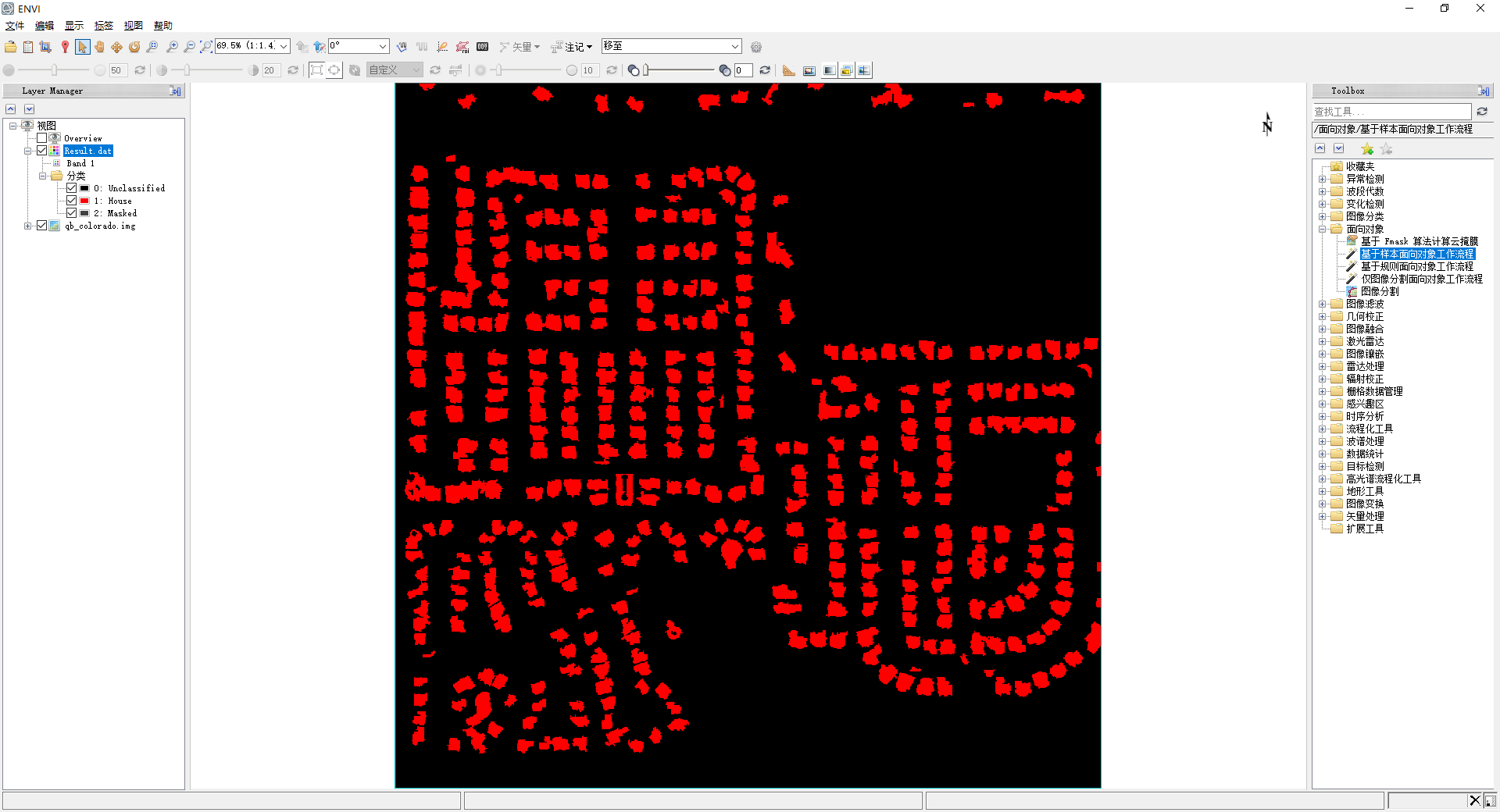
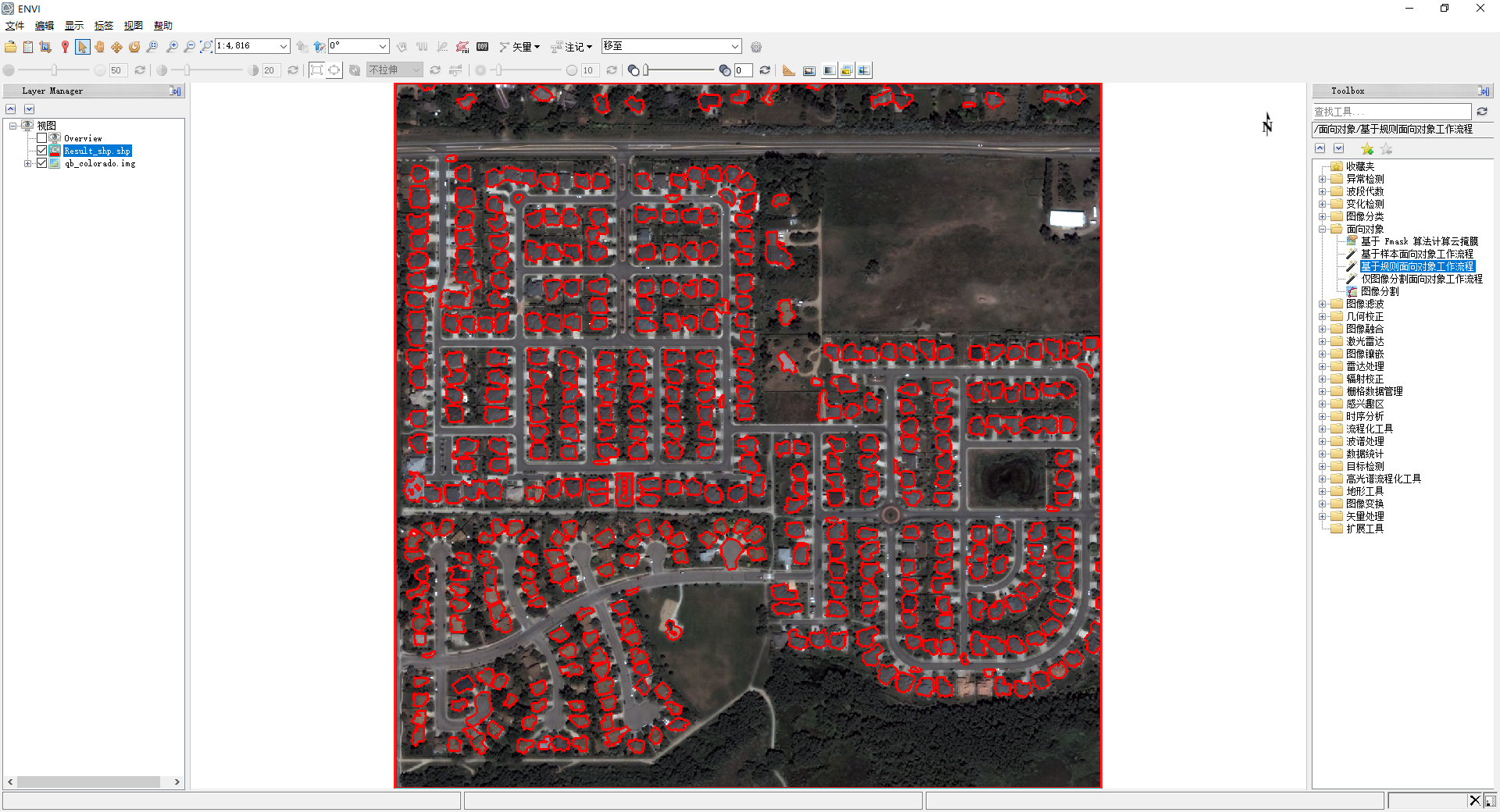
五、实验结果
下图为输出栅格最终结果
下图为输出矢量最终结果
六、总结与分析
在本次实验中,我学会到这种不同于监督分类的新的分类方法。在以往的遥感影像处理中,影像的分辨率较低,使用监督分类就能很好得进行分类处理。而高空间分辨率影像引其能够清晰、准确地表达地物边界、形状、纹理、内部结构和空间关系等特征,在许多领域应用越来越广泛。随着分辨率的提高,基于传统的像元分类方法,不再能有效地提取出影像中地空间结构信息,分类精度不高。而此次实验使用的快鸟数据为亚米级影像数据,分辨率高达0.6m,传统的基于像元的分类已经不能满足需求,面向对象的分类技术就能很高效地被运用起来。
面向对象的分类技术以分割对象作为解译单元,充分利用影像地多种信息,使得高分辨率影像的光谱特征更加明显,地物的内部结构、表面纹理和空间布局也更加清晰。而基于规则的面向对象提取,能够根据影像中地类的光谱、颜色、几何形状、纹理等特征,创建对应的规则,大大提高分类结果的精度。
另外本次实验的软件从ENVI Classic转到ENVI,新的界面也给实验操作到来不同的体验。